三脚歩行(Tripedal Walking)とは
三叉ヘビができたら次は三脚歩行かなということで,かなり昔から妄想してあたためていたテーマです.しかし三叉ヘビほど単純にはいきませんでした.単に三脚で歩くというだけならさして難しくないですが,いかに「三脚らしさ」「三脚ならでは」という特徴を出して行くかがセンスの見せ所になります.
最初に挑んだのは2005年度京大B4の興梠匠君の卒論で,このときは正攻法で多リンク脚による構成を考えました(ただしなるべく少数のアクチュエータで済むように工夫しました).
その後の2007年1月,イギリス長期滞在から帰る直前に,「いっそのこと関節を固定して,球体転がり問題になぞらえて非ホロノミック系と捉えたらどうか?」というアイディアを思いつきました.そこで関節を固定し重心揺動によって駆動するコンパス型三脚歩行ロボット(仮)と,そこに至る中間的モデルとしての半球ロボットsurface walkerの原案を帰国便の中で一気に書いて3月の制御部門大会で提案しました.
まずは足がかりとして半球ロボットの方をしばらくやることにし,2007年度の京大の卒論で小林義典君が取り組みました.
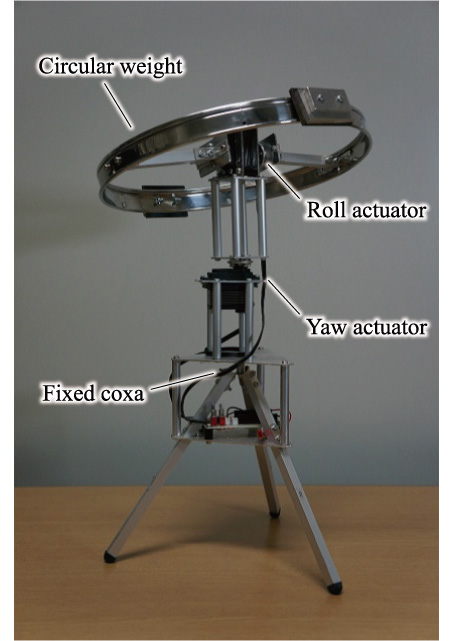
その後,2010年度の卒論で井上俊太郎君が果敢にもチャレンジしてくれました.原理はシンプルではあるものの,実際にやってみるとなかなか一筋縄ではいきませんでしたが,かなりの試行錯誤の果てに三脚歩行を実現することができました.三本足→火星人というSF的な連想で,ロボットの名前は火星人を意味する “Martian” と名付けることにしました.
まるで生まれたての子鹿のようなとても健気な動きを見せてくれます.しかしながら,脚先が剛体棒に硬質ゴムを貼付けた構造であるためにバウンドしやすい,滑りやすい,転倒しやすい,などの問題があり,再現性は高くありませんでした.
2011年度の卒論でこのテーマを引き継いだ加藤尭慧君の手により,脚先を球面状にし,サスペンションを導入するなどの構造上の改良に加えて,重心高さ・錘の重さ・揺動周期などを見直した結果,非常に安定して三脚歩行する Martian II が完成しました.モーションキャプチャを用いた実験データの解析なども進み,おおむね当初の理論で予期したとおりの接地パターンを示すことがわかりました.ここまでで,研究の第一段階としてはほぼ完成をみたと思っています.
また,研究室の各種ロゴデザインでおなじみの西原崇志君(大須賀・石川研2012.3修了)によって,冒頭に掲げたような Martianシリーズ のロゴが生まれました.”M” の字が Martian の構造を表す形になっていて,私は非常に気に入っています.
三脚ギャラリー
Martian I
2010-2011 井上俊太郎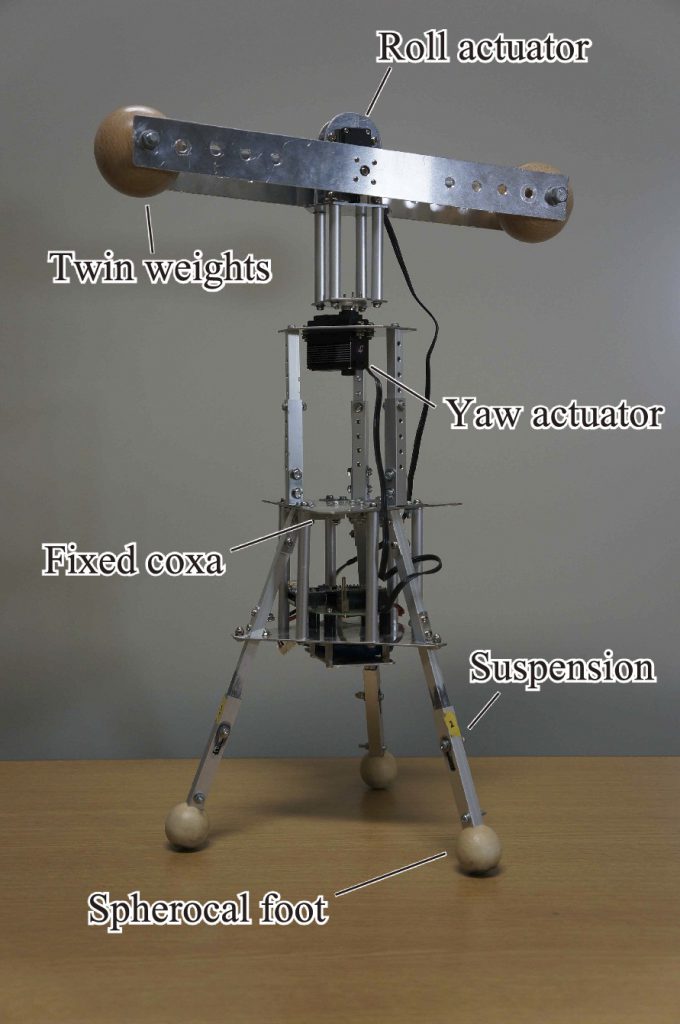
Martian II
2011-2014 加藤尭慧
Martian III
2014-2015 興賢太朗
Martian IIIs
2015-2016 安谷尚人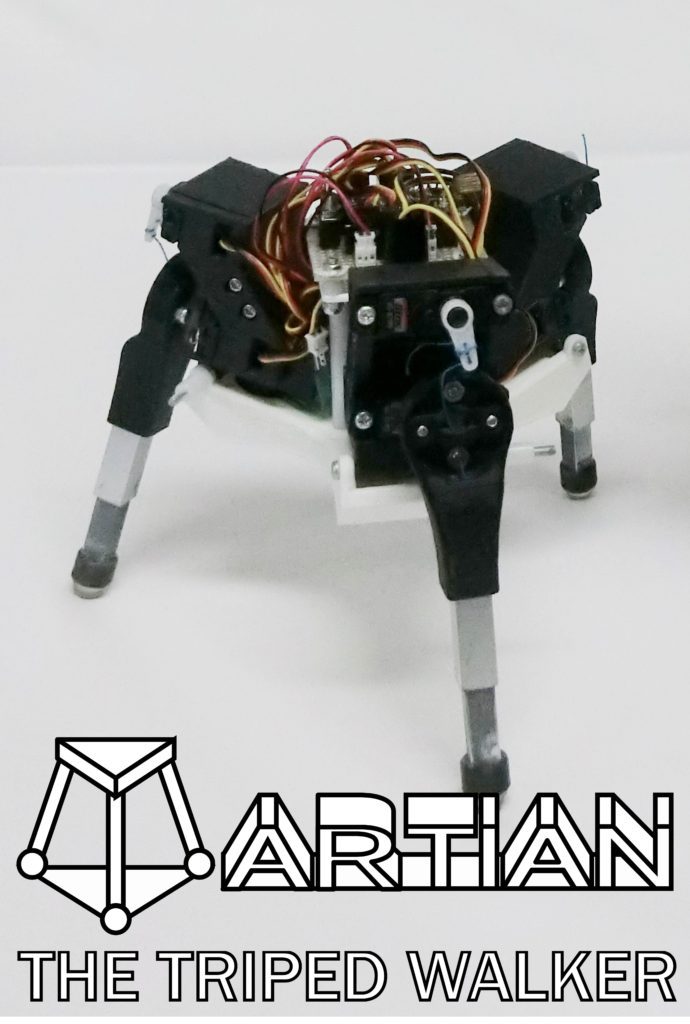
Martian petit
2016-2017 増田容一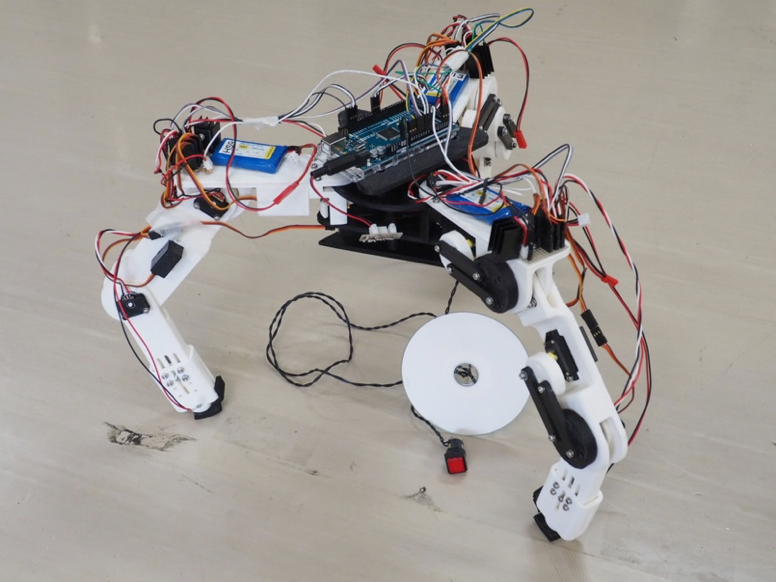
Kuratanian
2016 倉谷僚一
関連文献
- M. Ishikawa, N. Yasutani, R. Kuratani: On Decentralized Control of Tripedal Walking Robot using Reaction Force Feedback,Human-Centric Robotics; Proceedings of the 20th International Conference on CLAWAR 2017, pp. 431-438, 2017.
- M. Ishikawa: Moving on Three Legs — How to imagine and control non-biomimetic locomotion –,Invited talk at the 8th International Symposium on Adaptive Motion of Animals and Machines (AMAM2017),2017.
- Y. Masuda and M. Ishikawa: Simplified Triped Robot for Analysis of Three-dimensional Gait Generation,Journal of Robotics and Mechatronics,29(3),2017.
- K. Oki, M. Ishikawa, N. Yasutani, Y. Li and K. Osuka: Tripedal Walking Robot with fixed coxa driven by Radially Stretchable Legs,IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS2015,),pp. 5162-5167,2015.
- M. Ishikawa, T. Kato, Y. Sugimoto, K. Osuka and Y. Sankai: Tripedal Walking Robot with Fixed Coxa driven by Periodic Rocking, in Proc. of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS2012), Portugal, 2012.
- 石川,井上,大須賀:揺動とホロノミーの原理に基づく三脚歩行ロボットの研究,日本機械学会ロボティクス・メカトロニクス講演会(ROBOMEC2011),2A2-D03,2011.
- 井上,石川,大須賀:半球の移動原理を利用した三脚動歩行ロボットの開発,日本機械学会関西支部 学生員卒業研究発表講演会,2011. 《Best Presentation Award受賞》
- 石川将人: 生物に学ばない移動メカニズム−Control Oriented Locomotion−,システム/制御/情報,Vol.53, No.12, pp. 524-529, 2009.
- 石川:三足歩行機械の設計について,第7回制御部門大会,63-3-4, 2007.
- 興梠,石川,杉江:三足歩行ロボットの設計と制御,第50回システム制御情報学会 研究発表講演会 講演論文集,pp. 467-468, 2006.