Yoichi Masuda
Assistant Professor , Department of Mechanical Engineering, Osaka Univ., Japan増田 容一
大阪大学大学院工学研究科 附属フューチャーイノベーションセンター 助教 若手卓越教員
大阪大学大学院工学研究科 機械工学専攻 助教(兼任)
所在地:〒565-0871 大阪府吹田市山田丘2-1 M4-501〜505 (アクセス )
E-mail:
Phone: 06-6879-7267 (学生室)
Keywords
Robot Locomotion : Walking, Rolling, Deforming, Nonlinear OscillatorControl Theory : Formation Control, Adaptive Control, Sliding Mode ControlStructure : Structure Optimization, Soft and Compliant Structure, Tensegrity
Publication 論文
Robots ロボットたち
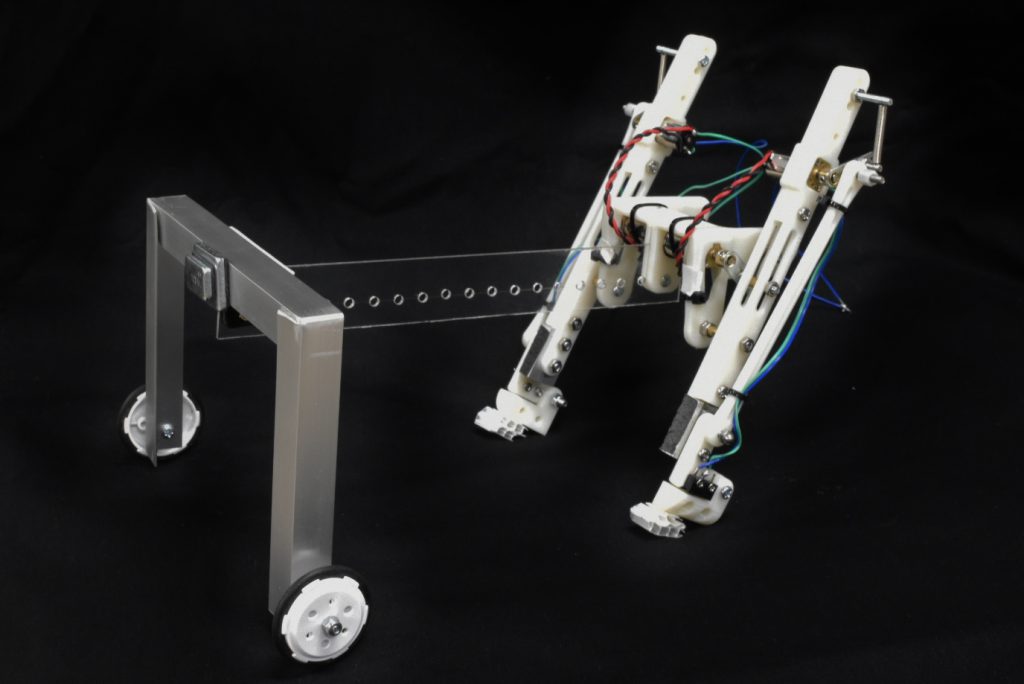
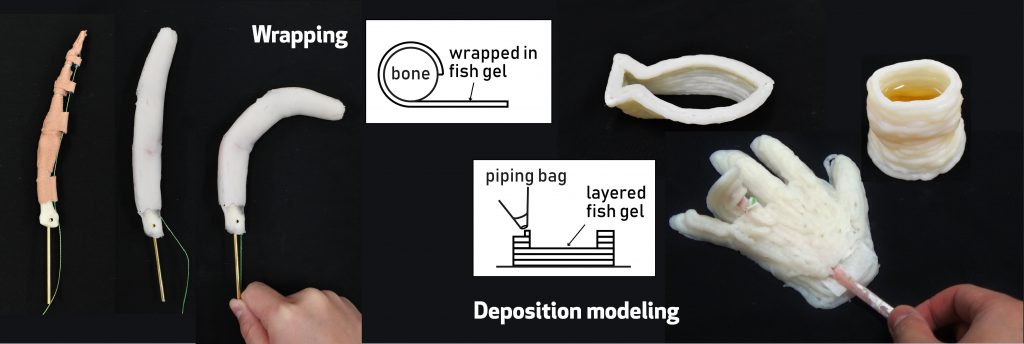
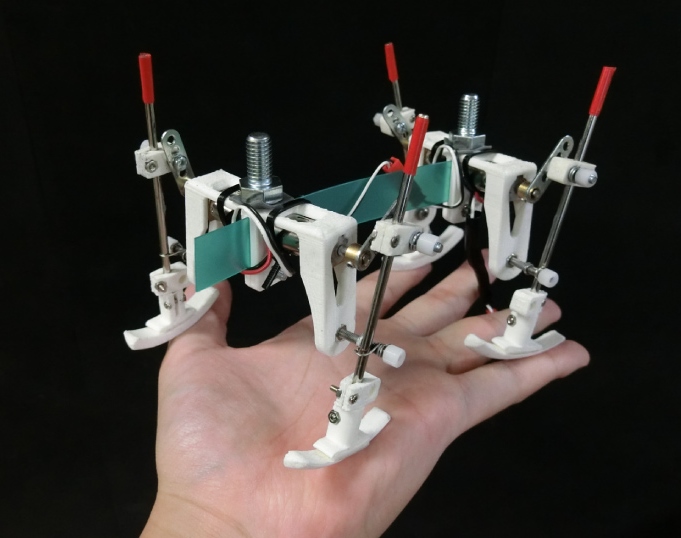
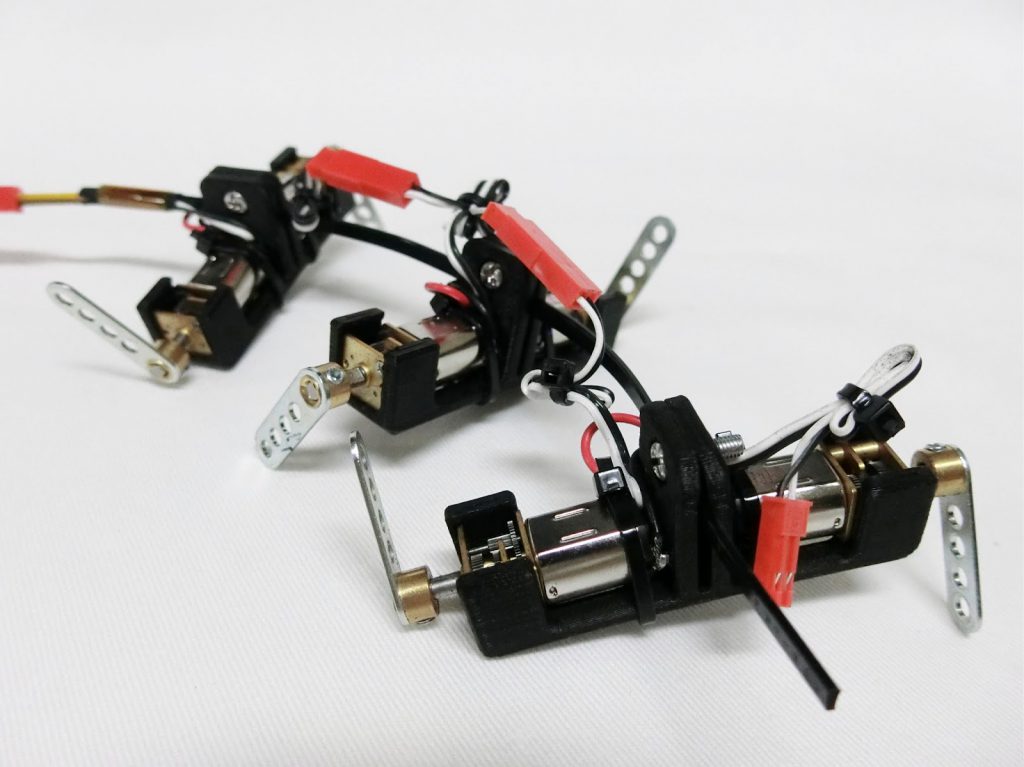
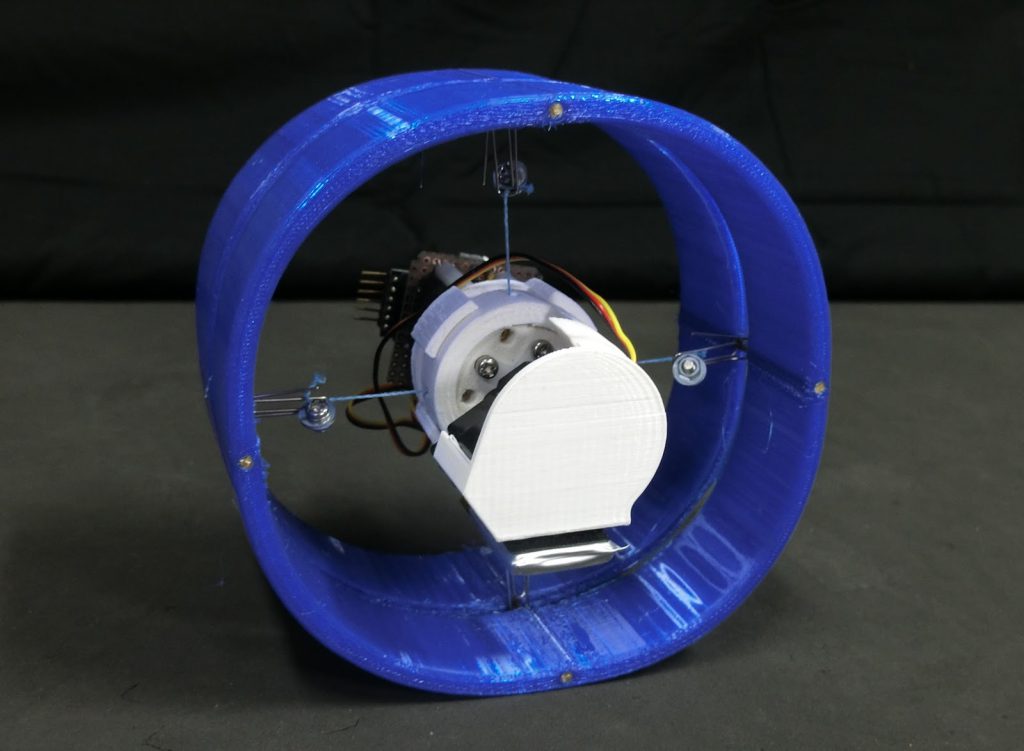
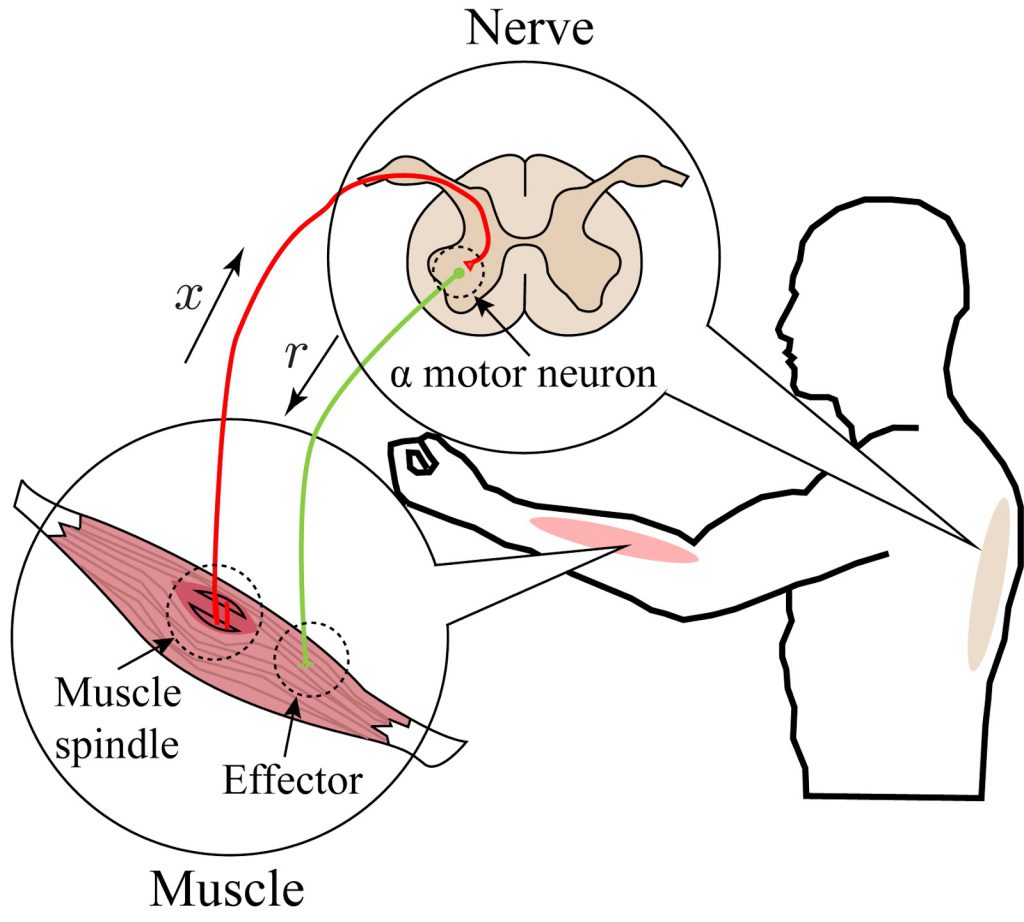
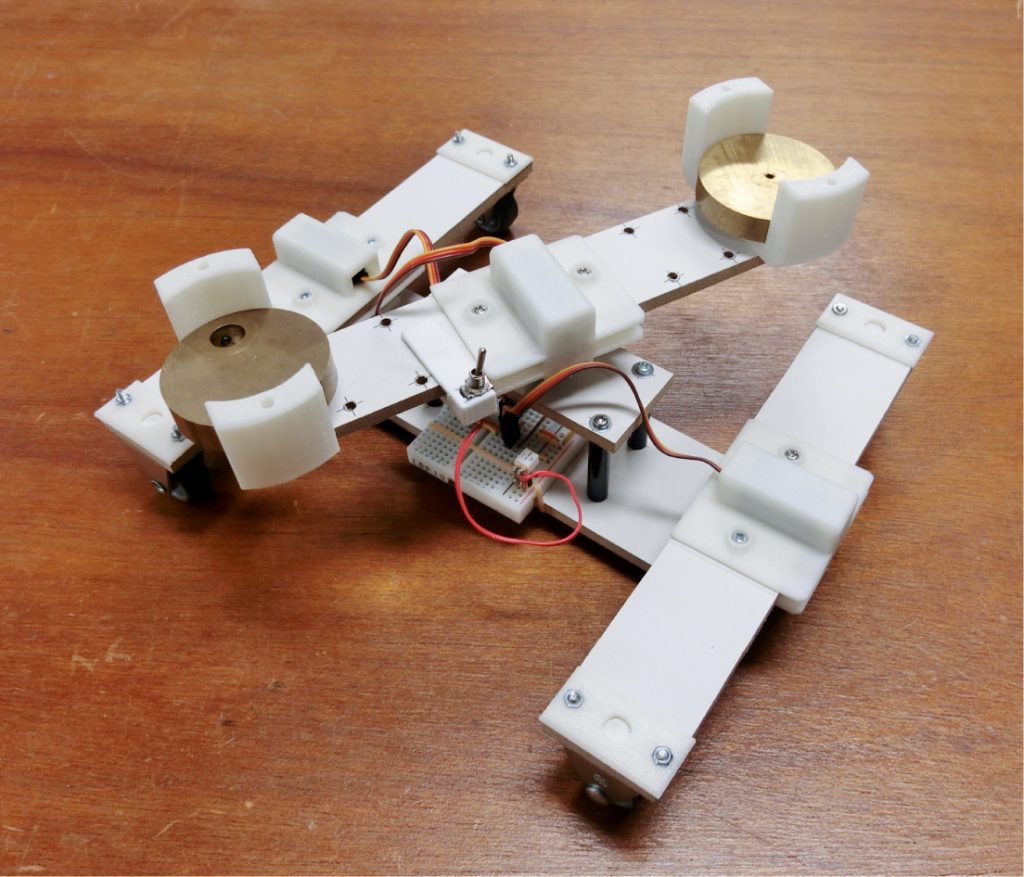
Pneumatic Brainless Robot II, 2020 Pneumatic Brainless Robot I, 2020 Brainless Robot Resembling Spinal Reflex, 2019 Soft Machines Made from Fish Myofibrillar Proteins, 2019
Brainless Quadruped Robot Brainless Hexapod Robot “DRR” Deformation-driven Rolling Robot 2017 Gait and Motion Generation Model Inspired by the Stretch Reflex 2017 “LigamentalJoint” “Ez-Snakeboard mkII” for Education 2016 Adaptive Formation Control
VIDEO
VIDEO
VIDEO
VIDEO
VIDEO
VIDEO
VIDEO
Media 報道
OU RESEARCH GAZETTE Vol.1,2023
「現実世界を乗り越える、“身体で考える”ロボットたち。」,ResOU リソウ ,2023
探究の階段 #159「ロボット生物学」,TV東京・BSテレ東,2022/11/17.
疑問解決なるほどね!「動物のようなロボット、できるの?」,朝日小学生新聞,2021/12/28.
「“猫歩き” ロボットで解明」,朝日新聞(夕刊), 2021/8/2.
「研究の世界のネコ型ロボット 歩く仕組みの解明に貢献」,朝日新聞デジタル , 2021/8/2.
「阪大、ネコの歩行ロボで再現」,日経産業新聞,2021/5/17.
「ネコ型ロボットを開発し、「反射」で歩く仕組みを解明 阪大」,JSTサイエンスポータル,2021.
「ロボットで解明!!ネコの4足歩行のヒミツ」,子供の科学7月号.
“Video Friday: Snugglebot Is What We All Need Right Now” IEEE spectrum , 2020.
“Weak, Brainless Quadruped Robot Autonomously Generates Gaits.” IEEE spectrum , 2017.
“Who Says Robots Need to Be Smart?.” Hackstar.io , 2017.
“Martian-Inspired Tripod Walking Robot Generates Its Own Gaits.” IEEE spectrum , 2017.
“Video Friday: More Boston Dynamics, Giant Fighting Robots, and ANYmal Quadruped.” IEEE spectrum , 2017.
“Could This Squishy Robot Be the Future of Robotics?.” GIZMODO , 2017.
“輪っかを変形させてコロコロ進むロボット” GIZMODOジャパン , 2017.
Honors & Awards 受賞歴
2015 日本機械学会三浦賞
2017 AMAM2017 Best Poster Award
2017 生産技術振興協会 海外論文発表奨励賞
2017 NOLTA2017 Student Paper Award
2018 第14回IEEE関西支部学生研究奨励賞
2018 システム制御情報学会研究発表講演会 SCI’18 学生発表賞(5/16)
2018 システム制御情報学会研究発表講演会 SCI’18 学生発表賞(5/18,↑とのダブル受賞)
2019 自動車 技術会大学院研究奨励賞
2019 The 9th International Symposium on Adaptive Motion of Animals and Machines Best Robot Demo Award
2019 第62回自動制御連合講演会 優秀発表賞
2020 システム制御情報学会 2020年度奨励賞
2020 2020年度 計測自動制御学会論文賞
2021 研究科長表彰
2021 大阪大学賞
2022 日本機械学会ロボメカ部門 ROBOMECH表彰(学術研究分野)(第一著者:福原助教)
2023 計測自動制御学会 関西支部 技術賞
2023 The 11th International Symposium on Adaptive Motion of Animals and Machines Best Robot Demo Award(第一著者:福原助教)
2023 Advanced Robotics Best Paper Award
2025 第6回日本ロボット学会優秀研究・技術賞
2026 The 2026 IEEE/SICE International Symposium on System Integration (SII 2026) Best Paper Finalist(第一著者:陶斯遠)
Awards of Co-authors 共同著者の受賞
2018 計測自動制御学会SI2017優秀発表賞(B4田中君が受賞)
2020 日本機械学会 若手優秀講演フェロー賞(M2荒木君が受賞)
2022 自律分散システムシンポジウム萌芽研究部門優秀研究奨励賞(B4石浦君が受賞)
2022 大阪大学前期オナープログラム・ベストパフォーマンス賞(理学部B3藤森君)
2022 大阪大学後期オナープログラム・ベストパフォーマンス賞(理学部B3藤森君)
2022 大阪大学自主研究奨励事業・最優秀賞(理学部B3藤森君)
Research support 研究資金獲得歴
2016 立石科学技術振興財団 研究助成 (C)
2017 日本学術振興会特別研究員 DC2
2020 公益財団法人京都技術科学センター研究開発助成
2020 科研費(若手研究)
2021 JST創発的研究支援事業
2021 立石科学技術振興財団 研究助成 (B)
2021 基盤B(分担)
2021 基盤B(分担)
2021 積水化学自然に学ぶものづくり研究助成
2022 基盤B(代表)
2023 基盤S(分担)
2024 基盤A(分担)
Education 学校歴
1990年 奈良県にて初確認
2009年3月 大阪星光学院 卒業
2013年3月 和歌山大学 システム工学部 卒業、学士(工学)
2016年3月 和歌山大学大学院 システム工学研究科 博士前期課程 修了、修士(工学)
2019年3月 大阪大学大学院 工学研究科 機械工学専攻 博士後期課程 修了、博士(工学)
Professional & Teaching experience 職歴と教育歴
2013年4月〜 TA, STA, RA等
2016年4月〜 中高生のためのロボット教材を開発・製作体験会の実施
2017年4月〜2019年3月 日本学術振興会特別研究員 DC2
2019年4月~ 2021年3月 大阪大学大学院 工学研究科 機械工学専攻 助教
2021年4月~大阪大学大学院 工学研究科 付属フューチャーイノベーションセンター 助教
大阪大学大学院 工学研究科 機械工学専攻 助教(兼任)
研究室の遍歴
安田・徳田研究室(2013-2014)
長瀬研究室 (2014-2015)長瀬・徳田研究室 (2015-2016)石川研究室(2016-),
石川・南研究室(2019-)
所属学会
その他