本研究室は,制御,ロボット,学習をはじめとしてさまざまな分野の研究を行なっています.生物学からAIや建設機械まで,一見するとまとまりがみえないほどの多彩なテーマを取り扱っていますが,その背景には,スタッフが主に制御理論を通して培ってきた「システム思考」があります.我々は研究対象を限定しません.あらゆるものごとの「ふるまい」,すなわち広い意味での「動くもの」に目を向け,そのメカニズムの解明と設計に取り組んでいます.

モットー
また本研究室では,「眼」と「手」と「頭」を総動員することをモットーに掲げています.「眼」は実際の現象をつぶさに見ることを,「手」は自らなんでも作って確かめるクラフトマンシップを,「頭」はそれを論理的・数理的に解析する思考力を意味しています.いずれが欠けてもよい研究はできないと考えています.
研究体制
教員は石川将人教授,南裕樹准教授,増田容一助教の3名です.石川教授は非線形制御理論・非ホロノミック力学・数理科学を得意とし,主に移動ロボット,建設機械,群システム,生物進化,空想生物,言語学などに興味を持っています.南准教授は制御工学全般に精通し,量子化制御(離散値入力制御),ネットワークシステムの制御,ノイズシェーピングに基づく制御系設計論,「光」を活用したナビゲーションや自律走行への応用などで多くの業績を上げてきました.最近では研究室におけるAI関連研究を中心となって進めているほか,Pythonなどの計算機技術の普及活動,ゲーミフィケーションを活用した工学教育の研究にも取り組んでいます.増田助教は無脳ロボティクスとよばれる一連のアプローチを開拓して2019年に学位を取得した気鋭の若手です.ロボティクス全般,特にテンセグリティ系や筋骨格系をはじめとする機構設計・解析を得意としているほか,最近では神経生理学や解剖学的知見に基づく動物ロコモーションの原理究明やソフトロボティクスなど,より生物学にリアルに寄り添った研究も進めています.さらに2021年度からは,東北大学電気通信所 石黒研究室で学位を取得し,JSPS特別研究員PDとなった鈴木朱羅博士を迎え,自律分散制御と非線形制御理論,生物模倣と非生物模倣の真の融合を目指して研究を進めています.
研究は,教員ごとのグループで進めることもありますが,完全にバラバラではなく各自の強みを活かし合って有機的に連携しています.南准教授は個人websiteでも詳しく研究紹介をしていますので,こちらも参考にしてください.
【注】鈴木助教は2024年4月1日より東北大学助教として転出しました.また,南准教授は2025年4月1日より兵庫県立大学教授として転出しました.
※コマツみらい協働研究所との関係
石川教授は大阪大学コマツみらい協働研究所の所長を兼任しています.石川研,コマツ,コマツ協働研の三者で連携しながら複数の共同研究を行っています.また,コマツ協働研に所属する学生は全て石川が指導教員となります.
非線形制御理論
非線形制御理論は本研究室の様々な研究テーマのベースとなっている理論です.線形システムにはみられない,非線形システムならではの特性を正面から取り扱い,分岐理論・力学系理論や自律分散制御も援用して,多彩な非線形システムのふるまいを引き出します.
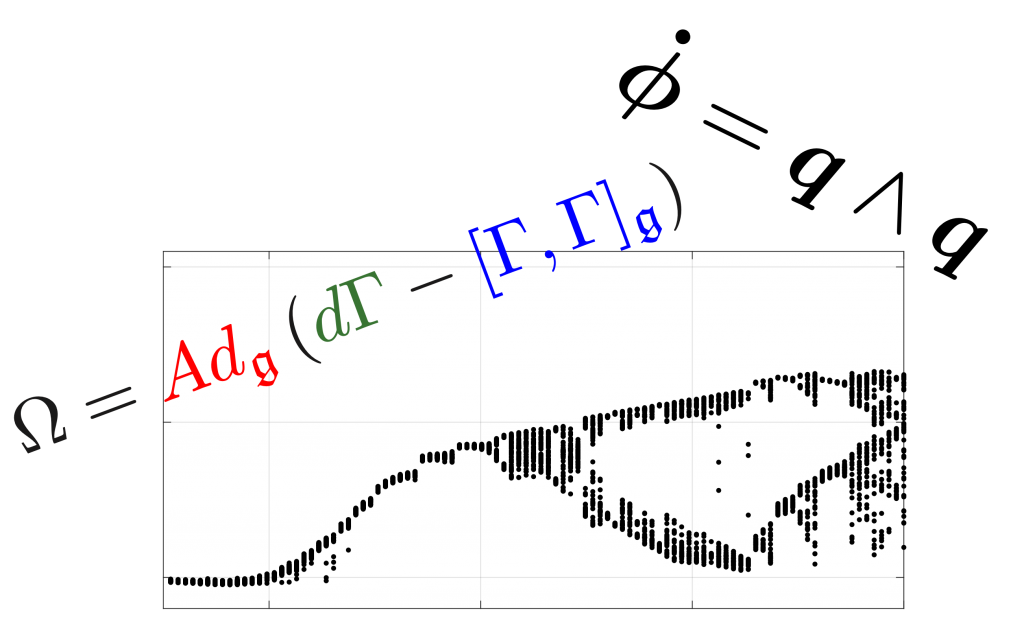
- 微分位相幾何学,Lie群論に基づく非線形システムの解析・設計
- 非ホロノミックシステム,複雑な可制御性構造を有するシステムの制御
- ロコモーションの数理
- 自律分散的アプローチによる非線形システムの解析と制御
三叉ヘビロボット
三叉ヘビは,放射状に伸びた三本の足先に受動車輪のついたロボットです.受動車輪が横滑りしないという非ホロノミック拘束をうまく活用し,車輪が床面から受ける拘束力を推進力に変換することでクネクネと移動します.数理から生まれたロボットです.ある特殊な構造を持つ日ホロのミックシステム(2ジェネレータ・1次の可制御構造をもつ対称アフィン系)の具象化として,純粋に数理的な興味から考案されました.
→三叉ヘビロボット詳細
→ヘビロボット詳細
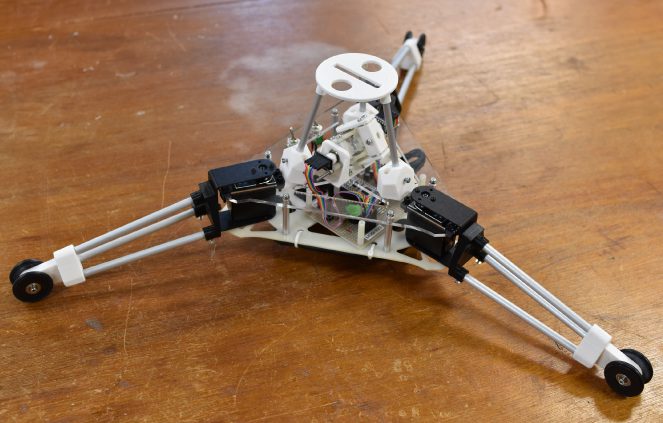
三脚歩行ロボット
Martian(マーシャン:火星人)は,「地球上に存在しない生物」という妄想を具現化した歩行ロボットです.地球上には,われわれ二本脚の人間や,四本脚のウマやイヌ,六本脚の昆虫がいます.それではなぜ,三本脚や五本脚の生物は存在しないのでしょうか?もしいたとしたら,どんな動きをするのでしょうか?

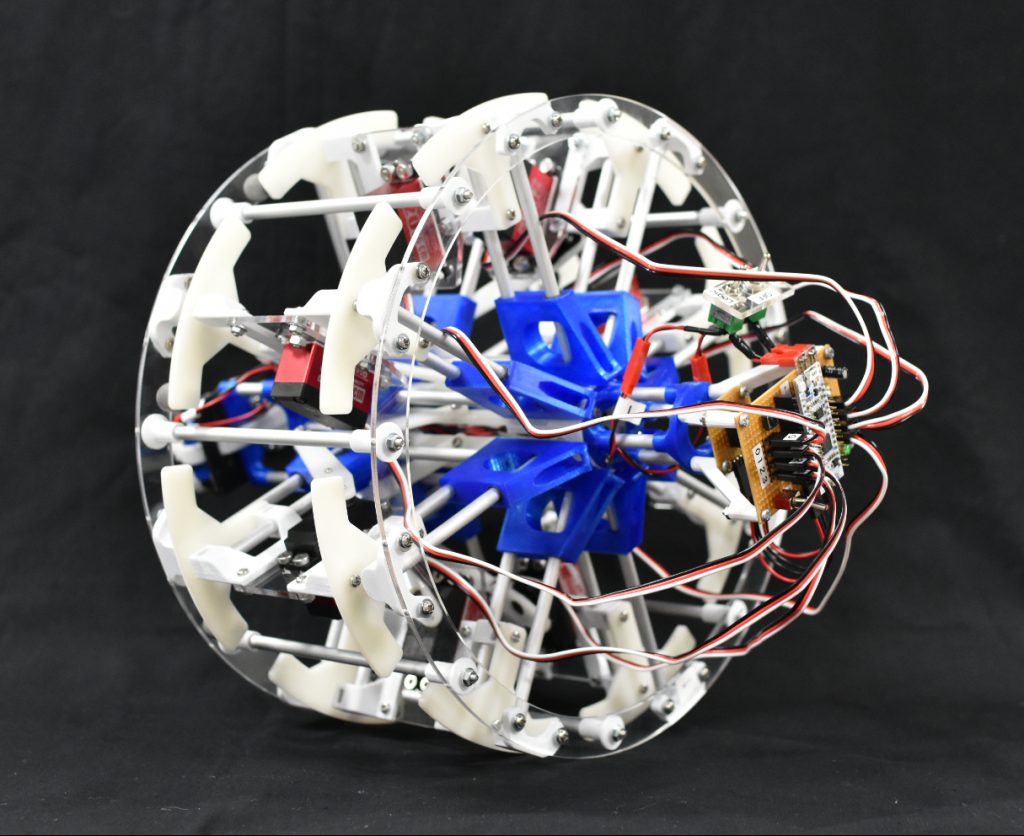
転がり移動ロボット
転がる・揺れる(Rock and Roll)――本研究室では,ボディを傾けることにより床面との間の摩擦条件の非線形な変化を推進力に転換する,転動と揺動によるロコモーションを追求しています.形状可変型・柔軟型・質量駆動型などさまざまなタイプの転がり移動ロボットを開発し,動力学解析や運動制御手法の構築を行っています.
大型作業機械の研究
油圧マニピュレータ,油圧ショベル,ブルドーザ….制御理論,システム同定理論,機械学習,ロボット技術などを駆使して,みんなの憧れ「はたらくスーパーロボット」の高機能化を研究しています.コマツおよびコマツみらい協働研究所をはじめとした企業の協力のもと,産学連携研究として取り組んでいます.
- 油圧ショベルの掘削過程のモデリング,高効率な軌道と機構の設計論
- 機械学習を用いた大型建機の振動予測(2016-2017)
- 油圧マニピュレータのモデリングと制御
(三菱重工業/国際廃炉研究開発機構IRIDとの共同研究 2015-2018)
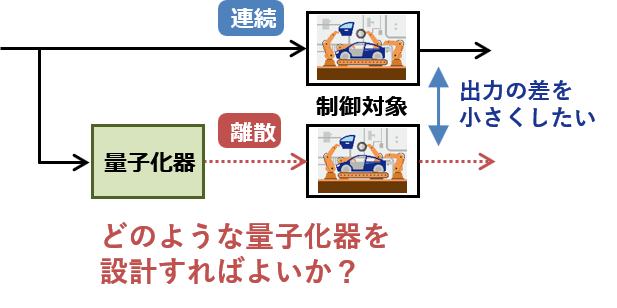
ノイズシェーピングに基づく制御系設計論
通常,制御系設計では,制御対象の入力は連続値であることを前提としています.しかし現実には,ON/OFFのような離散値に制限されることがあります.本研究では,そのような制御対象を上手に制御するために,ノイズシェーピング量子化器という信号変換器をうまく設計して制御系に組み込む方法を提案しています.また,その設計論を他分野の問題に応用する研究も進めており,大規模ネットワークシステムに対する分散最適化手法やニューラルネットの軽量化手法を提案しています.
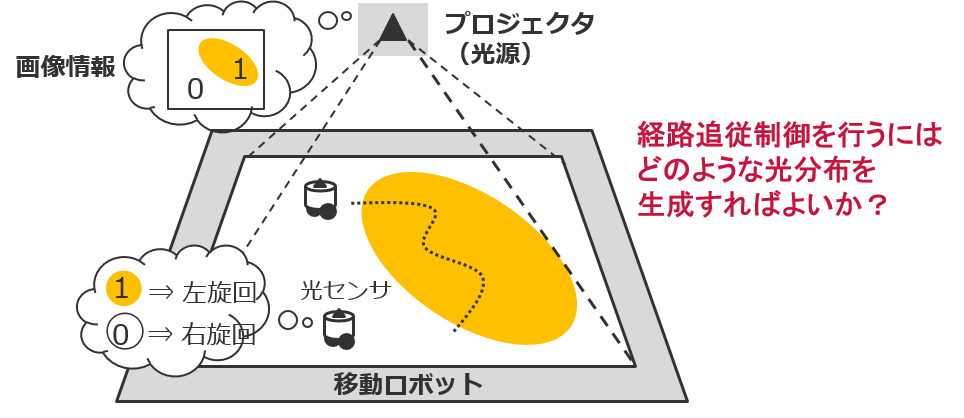
環境刺激を利用した制御
ロボット自体を高度に知能化するのではなく,環境を知能化したうえで環境とロボットを相互作用させてタスクを達成する方法論の構築を目指しています.たとえば,右図は,光センサが搭載された移動ロボットをプロジェクタの光で制御するというシステムです.このシステムにおいて,移動ロボットの制御則が超シンプルである(たとえば,光があたると右旋回,光があたらないと左旋回)場合,「タスクを達成するには,どのような光分布を生成すればよいか?」という問題に取り組んでいます.
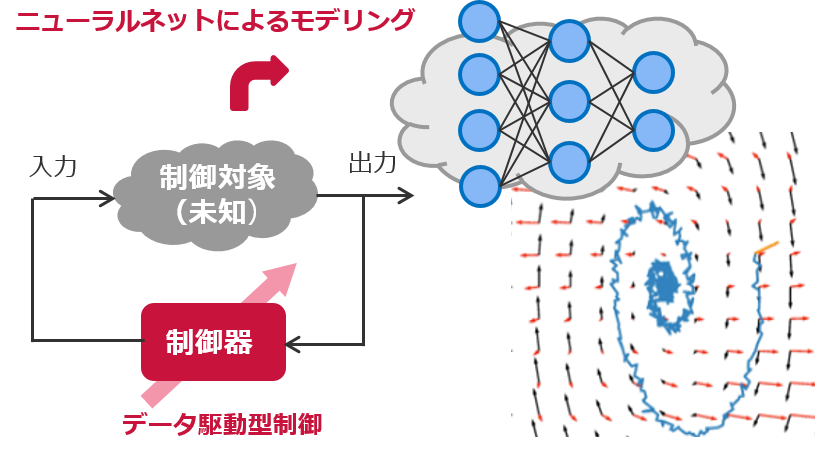
機械学習的手法を用いたモデリングと制御
制御したい制御対象のモデルが未知(あるいは一部が未知)である場合には,制御対象の入出力データからモデルを構築します.本研究室では,AI分野で開発されている機械学習手法を援用して(参考にして),動的機械システムのモデリングを行うことに挑戦しています.また,複数回の実験を行なって,制御対象の入力をタスクに応じて直接決定する強化学習に関する研究も行っています.
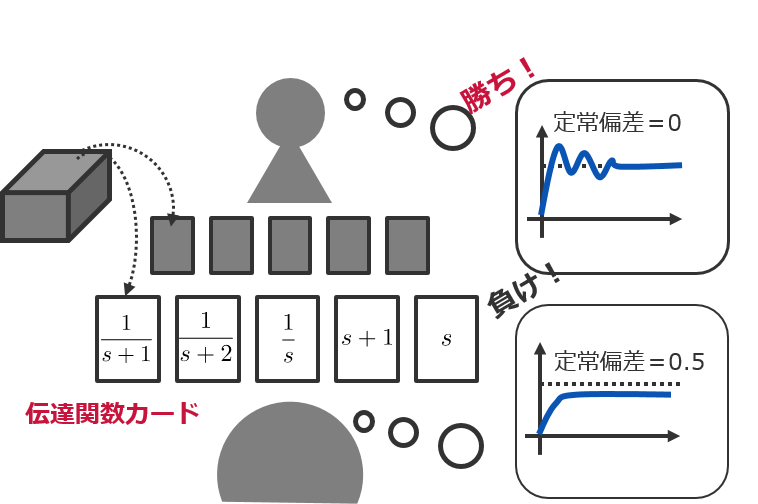
ゲーミフィケーションを利用した制御工学教育
ゲーム的な仕掛けによって,人の学習過程がどのように変化するのかに興味を持っています.具体的に,ゲームの要素を加えることで,難解なロボット・制御工学を楽しく学ぶことができるようになる教材の開発を目指しています.これまでに,制御工学の重要な単元を学習できるカードゲーム(ポーカーゲーム)を提案しています.
自律走行・自動運転

- つくばチャレンジ:画像情報に基づく車両の自律走行―「道なり走行」の研究
(コマツみらい建機協働研究所によるプロジェクト) - 予測ガバナを用いた自動走行制御
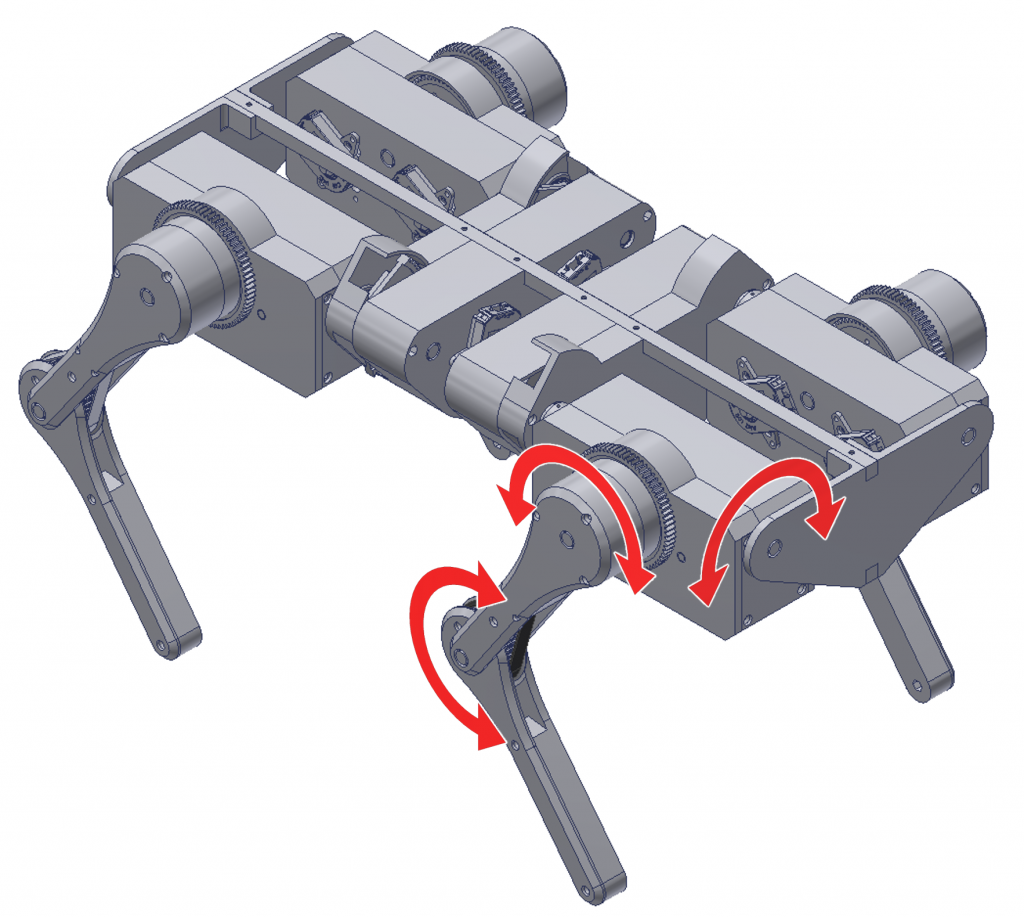
脚歩行ロボット:動物の理解を通してロボット制御をシンプル化・高性能化
本研究室では,動物に備わる運動原理の謎を解明してロボットに実装することで,脚歩行ロボットのさらなる運動性能の向上を目指します.高速・高トルクのモータを用いた四脚歩行ロボットを開発することで新たな制御法の検証を可能にします.
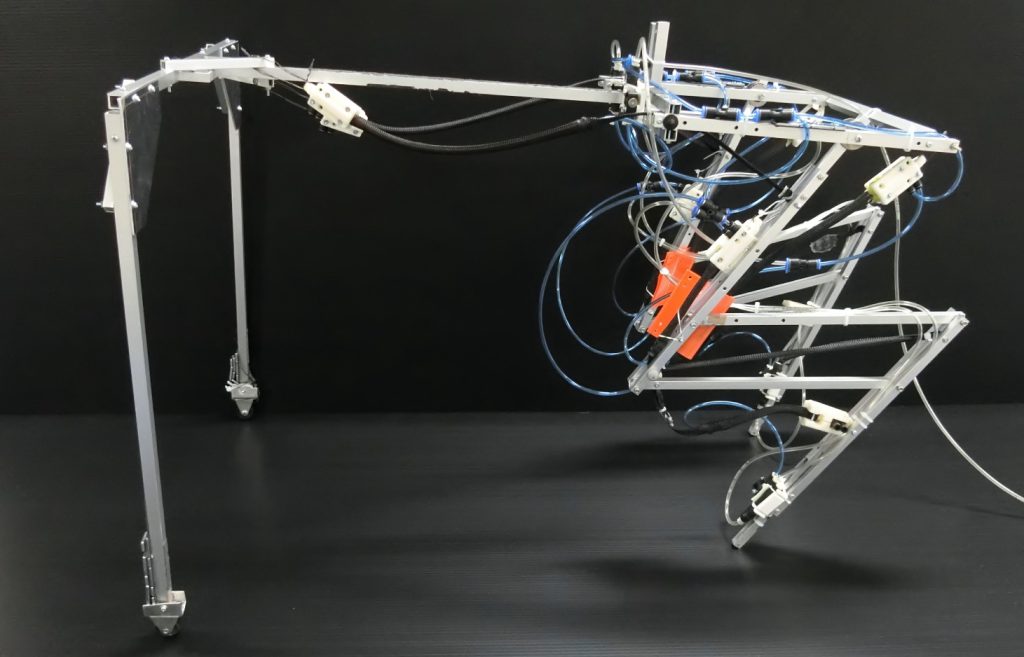
反射型 筋骨格走行ロボット: 動物の即時即応能力に迫る
自然界の動物は,全身に備わる多数の反射型制御フィードバックを活用することで即時即応の運動を生み出しています.このような運動原理を再現するべく,動物の反射を再現する走行ロボットの開発を進めています.
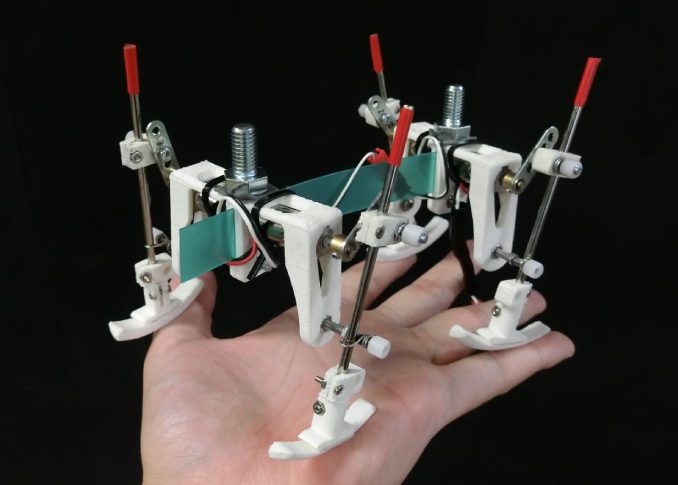
無脳ロボット: 計算なき「弱い制御」を切り拓く
本研究グループは,「無脳歩行現象」と呼ばれる,とある不思議な新現象を発見しました.本現象では,センサやマイクロプロセッサ,コントローラを一切持たない超シンプルなロボットが,四脚動物と同じ運動パターンを生み出し,しかも入力電圧に応じて歩容を切り替えることが明らかになりました.「弱い制御」を理解して応用することで,これまでのロボットに使われていた複雑な制御が不要になるかもしれません.
歴史上・空想上 の動物ロコモーション
恐竜やケンタウロス・三本脚の火星人がこの地球上に居たとしたら、いったいどのように歩くでしょうか?本研究では,現存する動物とは異なる形態をもつ歴史上・空想上の動物ロコモーションを真面目に解き明かします.
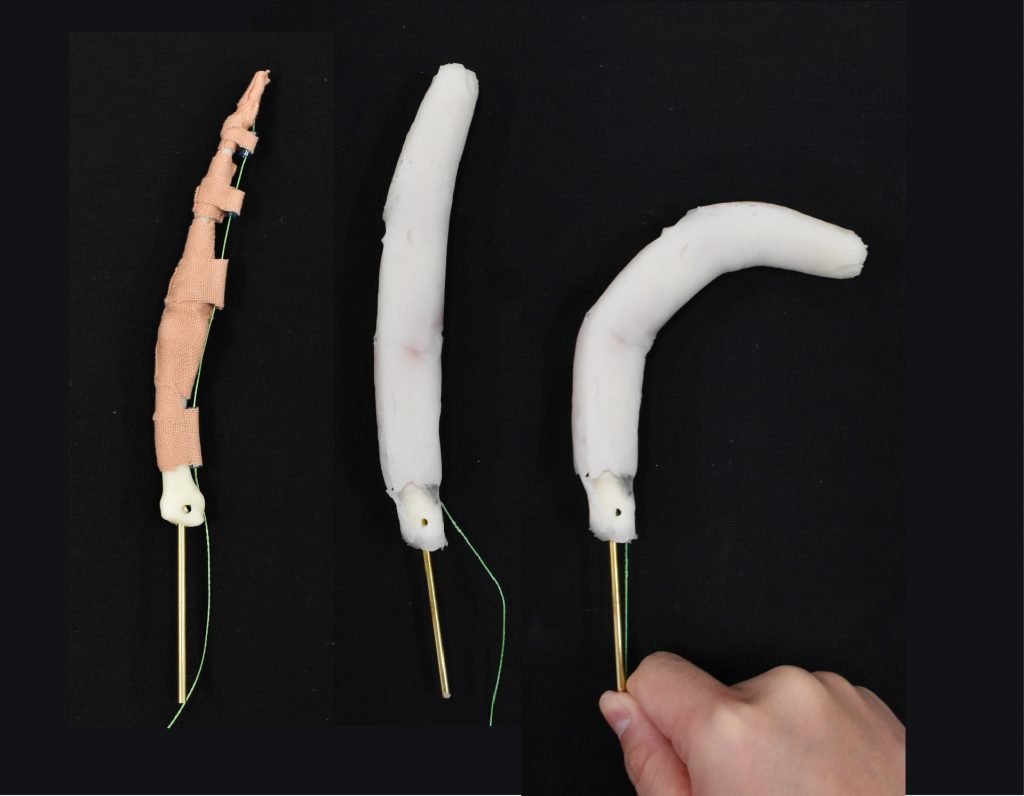
ソフトロボット
自然界に目を向けてみると,われわれ生物の身体のつくりはひどく不正確で誤差や個体差だらけ,たとえ解剖してみても,どこからどこまでがひとつの部品なのか,その境界すらも曖昧です.いまのロボットと生物の間には,設計や製造法の考え方に根本的な隔絶があります,このような壁を取り除き,真に生物的で生ナマしいロボットをつくることが本研究の目標です.
生物ロコモーションのメカニズム
- スナガニ属の多脚高速ロコモーションの解析
- 砂上の蛇行ロコモーション
- ヘビ,スナヘビ,スナガニ,カタツムリ,メダカ…etc

著書・解説記事もぜひご覧ください
卒論・修論・D論題目
| 年度 | 学位 | 氏名 | タイトルまたはテーマ | 所属 |
| 2017 | B | 工藤瑛人 | 分散型質量駆動ユニットを用いた転がり移動ロボットの制御 | 石川研 |
| 2017 | B | 建部尚道 | スナガニの走行モデルの構築と動力学解析 | 石川研 |
| 2017 | B | 田中颯樹 | アクチュエータの「弱さ」を利用した跳躍ロボットの非線形力学解析 | 石川研 |
| 2017 | B | 中尾文香 | 時空間光制御によるロボットナビゲーション | 石川研 |
| 2017 | B | 名倉健太 | 油圧ショベルの掘削過程における土砂挙動のモデル化 | 石川研 |
| 2017 | B | 湯浅貴道 | 水上三叉ヘビ型移動ロボット | 石川研 |
| 2017 | M | 後藤健吾 | フィードバック変換を用いない非ホロノミックシステムの解析と制御 | 石川研 |
| 2017 | M | 藤田帝智 | 腹足モデルに基づくカタツムリの這行ロコモーションの解析 | 石川研 |
| 2017 | M | 宮崎洋人 | ヘビ型移動体によるdirect wave型推進メカニズムの解明 | 石川研 |
| 2017 | D | 李 鈺 | On Efficient Control for Power Systems with Randomly Distributed Solar Photovoltaic Generators |
石川研 |
| 2016 | B | 青木 達朗 | 環境反力のフィードバックによる三叉ヘビ型ロボットの制御 | 石川研 |
| 2016 | B | 池田 智裕 | 画像による道なり走行のための路面テクスチャにロバストな走行路検出 | 石川研 |
| 2016 | B | 篠原 健太 | スナガニの高速走行時の運動解析とモデル構築 | 石川研 |
| 2016 | B | 平野 貴裕 | 深層学習のリッチセンサ搭載ロボットへの適用について | 石川研 |
| 2016 | B | 吉田 侑史 | 可変形ロボットによる転がり移動に関する研究 | 石川研 |
| 2016 | B | 和賀井 将眞 | 建機車載カメラの振動抑制について | 石川研 |
| 2016 | M | 芦田 崇将 | 油圧ショベルの掘削モデルに基づくリンク機構の最適化 | 石川研 |
| 2016 | M | 倉谷 僚一 | 弾性関節を用いた三脚歩行ロボットの自律分散制御 | 石川研 |
| 2016 | M | 古瀬 裕介 | 分散型質量駆動ユニットを用いた転がり移動ロボットの研究 | 石川研 |
| 2016 | M | 本多 亮介 | 深層学習を用いた建機車載カメラ振動の予測について | 石川研 |
| 2015 | B | 大塚 真生 | 画像を用いた非ホロノミック自律移動車両のロバスト道なり走行 | 石川研 |
| 2015 | B | 後藤 健吾 | スナガニ属の多脚高速ロコモーション | 石川研 |
| 2015 | B | 瀬戸山 靖広 | 6軸油圧マニピュレータのモデリングと制御 | 石川研 |
| 2015 | B | 原口 泰斗 | 油圧ショベルの効率化に向けた掘削過程のモデル化 | 石川研 |
| 2015 | B | 宮崎 洋人 | 局所振動を用いた砂上の蛇行ロコモーション | 石川研 |
| 2015 | B | 矢路 隼斗 | ホロノミーの原理に基づく四脚揺動歩行メカニズムの解析 | 石川研 |
| 2015 | M | 大路夏生 | 入力端の不可逆および出力端の可逆な静的非線形要素に対する動的入力変換器 (主指導は名古屋大学・浅井徹先生) |
石川研(浅井研) |
| 2015 | M | 藤原聖矢 | 楕円体転がりロボットの制御 | 石川研 |
| 2015 | M | 安谷尚人 | 床反力フィードバックを用いた三脚揺動歩行の制御 | 石川研 |
| 2014 | B | 芦田崇将 | 大型ブルドーザ遠隔操縦へ向けた搭載カメラ制振制御 | 石川研 |
| 2014 | B | 田中祥大 | 移動ロボットにおける画像処理を用いたパターン検出 | 石川研 |
| 2014 | B | 古瀬裕介 | 偏重心モデルを用いた球体型移動ロボットの動力学解析 | 石川研 |
| 2014 | M | 中山和樹 | アリに着想を得たヘテロ群による分散採餌行動の解析 | 石川研 |
| 2014 | M | 興津信秀 | 神経振動子対で構成されたネットワークの解析と非線形制御への応用 | 石川研 |
| 2014 | M | 沖賢太郎 | 脚伸縮型三脚歩行ロボットの実現と運動解析 | 石川研 |
| 2013 | B | 石松直樹 | 砂上における蛇行ロコモーションについて | 大須賀・石川研 |
| 2013 | B | 安谷尚人 | 揺動移動原理に着目した油圧ショベルの運動解析 | 大須賀・石川研 |
| 2013 | B | 吉川徹哉 | ノイズ駆動による分散ネットワークの同期について | 大須賀・石川研 |
| 2013 | M | 加藤尭慧 | 可変重心型三脚歩行ロボットの揺動解析と実現 | 大須賀・石川研 |
| 2013 | M | 田原孝将 | 自律分散的搬送行動によるパターン形成 | 大須賀・石川研 |
| 2012 | B | 中山和樹 | 自律分散移動体による輸送現象の離散解析 | 大須賀・石川研 |
| 2012 | B | 南航司 | 直動リンク型三叉移動ロボットの解析と制御 | 大須賀・石川研 |
| 2012 | B | 興津信秀 | 三叉ヘビロボットの分散型制御 | 大須賀・石川研 |
| 2012 | B | 沖賢太郎 | 非ホロノミック空中泳動ロボットの解析と制御 | 大須賀・石川研 |
| 2012 | B | 西聖二 | 超冗長システムの操縦インターフェースについて | 大須賀・石川研 |
| 2012 | M | 北卓人 | 超離散非線形システムの解析 | 大須賀・石川研 |
| 2012 | M | 岸元邦充 | Control of nonholonomic systems using nonlinear oscillator network | 大須賀・石川研 |
| 2012 | M | 平野哲郎 | Analysis and control of cylindrical rolling robot | 大須賀・石川研 |
| 2011 | B | 加藤尭慧 | 揺動を用いた三脚歩行ロボットの制御 | 大須賀・石川研 |
| 2011 | B | 衣笠一樹 | キャスターボード型移動ロボットの制御 | 大須賀・石川研 |
| 2011 | B | 藤井淳 | 関節機構による進行波形を用いた移動原理の研究 | 大須賀・石川研 |
| 2010 | B | 北卓人 | 横断関数法を用いた三叉ヘビロボットの動的フィードバック制御 | 大須賀・石川研 |
| 2010 | B | 井上俊太郎 | 三脚歩行の移動原理に関する研究 | 大須賀・石川研 |
| 2010 | B | 岸元邦充 | 一般化異構造マスタスレーブシステムの可操作性解析 | 大須賀・石川研 |
| 2010 | M | 北吉良平 | 偏心型ロータを用いた球体型ロボットの開発と制御 | 杉江研 |
| 2009 | M | 小林義典 | 複数の劣駆動空間移動体の少数入力による制御 | 杉江研 |
| 2009 | B | 品川真英 | 3リンクヘビ型ロボットにおける運動学的特異点の解析と検証実験 | 杉江研 |
| 2009 | B | 杉山暢克 | 速度指令型汎用ロボットアーム制御系の同定 | 杉江研 |
| 2008 | M | 藤野隆弘 | 周期ダイナミクスの解析に基づく三叉ヘビロボットの制御 | 杉江研 |
| 2008 | M | 黒岩拓人 | 非ホロノミック系における多重時間軸構造に関する考察 | 杉江研 |
| 2008 | B | 北吉良平 | RCサーボモータのモデリングと劣駆動機械系への応用 | 杉江研 |
| 2008 | B | 大脇克也 | 周期現象の解析に基づくヘビ型ロボットの制御 | 杉江研 |
| 2007 | M | 木内裕介 | 非ホロノミック力学に基づく球体型超音波モータのモデル化と制御 | 杉江研 |
| 2007 | B | 小林義典 | 転がり接触拘束を利用した半球型移動ロボットの開発と制御 | 杉江研 |
| 2005 | M | 喜安佑吾 | 運動量ダイナミクスに着目した非ホロノミック移動ロボットの制御 | 杉江研 |
| 2005 | M | 大西健太 | 低分解能センサを用いた倒立振子の実用安定化制御 | 杉江研 |
| 2005 | M | 芦田正治 | 入力特性に制約を持つ非ホロノミックシステムの周期入力制御 | 杉江研 |
| 2005 | B | 興梠匠 | 三足歩行ロボットの設計と制御 | 杉江研 |
| 2005 | B | 丸田一郎 | フィードバック量子化器を用いた離散値入力システムの制御 | 杉江研 |
| 2004 | M | 水瀬雄樹 | アフィンシステムを対象とした状態フィードバックによる非平衡点への制御 | 杉江研 |
| 2004 | B | 山田研次 | 跳躍ロボットの周期運動における適応型制御 | 杉江研 |
| 2004 | B | 大石理也 | 出力制約を考慮した離散値入力制御とその応用 | 杉江研 |