Rock and Roll!
本研究室では,揺れる(Rock)・転がる(Roll)ことによって移動するさまざまなロボットの研究を行っています.発端は,非ホロノミックシステムの一例として知られていた「転がる球体の操り問題」でした.そこから主客を入れ替えた球体型「移動ロボット」に着手し,また全回転を伴わずとも制御次第では揺動だけでも移動できることに気づいて半球型や円筒型の移動ロボットを発案したり,三脚歩行へと展開したり,建設機械の操縦安全性を論じたり,体操競技とのつながりを考えたりと,興味深い研究課題がつぎつぎと生まれてきました.まさに力学問題の宝石箱というほかありません.本研究室では,これらを総称して転動・揺動ロコモーションと呼んでいます.
当初は機体内部の質量分布を変化させて転がるマスドライバ型転動ロボット(Mass-driven Rolling Robot=MR^2; 平野哲郎氏の命名)を主に扱っていましたが,最近は機体の変形を陽に取り入れた可変形転がり移動ロボットなども研究し,転動・揺動ロコモーションの力学的原理,すなわち,拘束力・重力・慣性力などをボディの推進力に転換するメカニズムを探求しています.
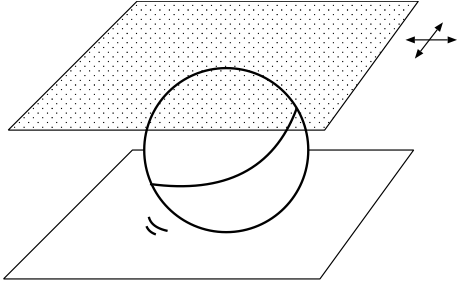
球体の転がり (Rolling Sphere)
平面上の球体の転がり,より一般には凸曲面と凸曲面の転がり接触条件は典型的な非ホロノミック拘束で,面白い制御問題がいろいろと考えられます.恩師のすすめで学生時代からこの問題に興味をもち,これまでに下記のような研究を行ってきました.
- ロボットハンドによる球体の転がり操り問題 (dexterous manipulation)
- 球体型移動ロボット “Volvot”
- 半球型移動ロボット “Surface Walker”
- 球面型超音波モータ
実は,ロボットハンドの平行移動による球体の姿勢操り問題はヘビロボットと同じ制御構造(われわれが2ジェネレータ2次あるいはクロスチェインド構造とよんでいるもの)を持ちます.このことに気づくきっかけとなったのは,一学年下の後輩の水野伸太郎氏(現NTT)が修論で発案した,ジェネレータ切り替え型のフィードバック制御アルゴリズムでした(今から振り返ると,よくこんなことを思いついたなと思います).その後数年かけてじわじわと意義を見出していった結果,複数ジェネレータシステムの制御理論,ヘビロボット,三叉ヘビロボット,cross-chained systemの理論などの様々な研究課題に発展し,最近では三脚歩行などという一見して関係のなさそうな研究にまで広がりつつあります.学位を取ってからの私の研究は,ほとんどこの転がる球体の問題に端を発したといっても過言ではありません.ありがとう球体(&水野君).
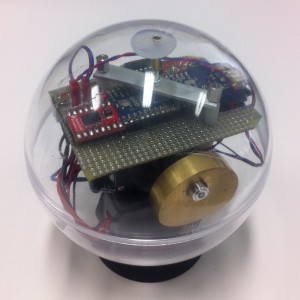
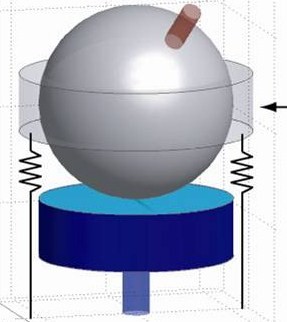
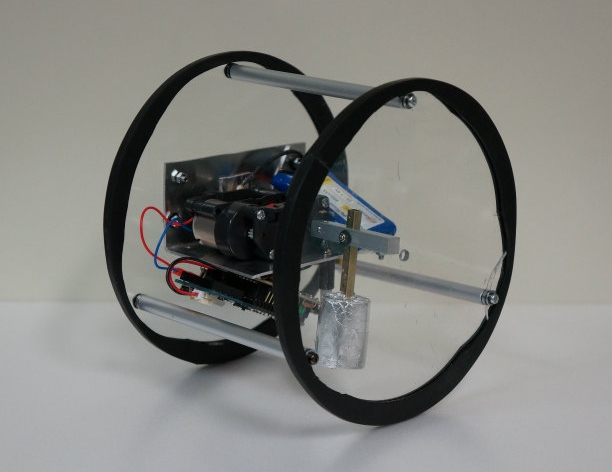
球体型移動ロボット “Volvot”
直径12cmほどの樹脂製の球殻の内部に質量移動機構を搭載し,自律で転がり移動するロボットです.これまでの非ホロノミック系研究で得た非線形可制御性解析の知見に基づき,アクチュエータは2つだけ搭載しています.1つめのアクチュエータが内部ユニット全体をヨー回転させ,2つめのアクチュエータが写真手前の真鍮製のロータ(おもり)をピッチ回転させます.ロータを偏心させ,振り子のような効果も持たせているところがミソです.
コントローラにはArduino FIO,アクチュエータにはHITECのRCサーボを使用しています.センサとしては小型の3軸加速度センサ,3軸レートジャイロなどを搭載しています.一見単純なメカに見えるかもしれませんが,制作者の北吉君がほぼ一年かけて試作を重ねた結果で,写真のメカは実は3代目です.”Volvot”という名前も北吉君による命名です.
【悲報】残念ながら,初代Volvotは2018年6月の大阪北部地震の際に棚から落下して大破してしまいました.
2010-2011 北吉良平

2012-2013 岸元邦充
2007-2008 木内裕介
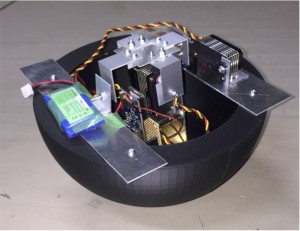
半球型移動ロボット(Rolling Hemisphere)
- The Surface Walker: a Hemispherical Mobile Robot with Rolling Contact Constraint,M. Ishikawa, Y. Kobayashi, R. Kitayoshi and T. Sugie, IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2009), pp. 2446–2451,2009.
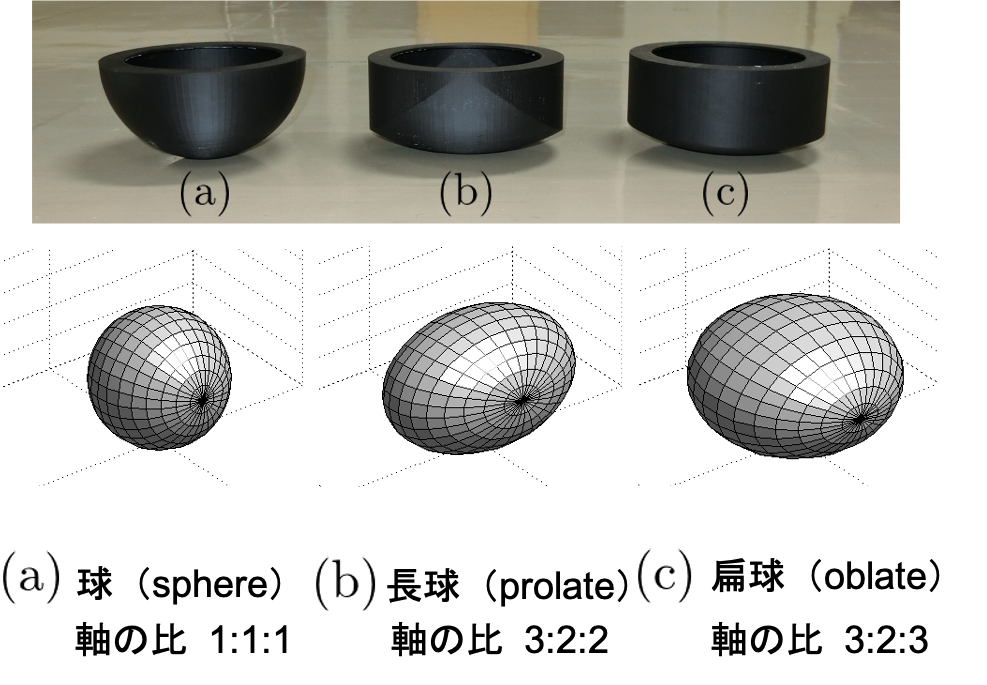
楕円体の転動と揺動
2015-2016 藤原聖矢
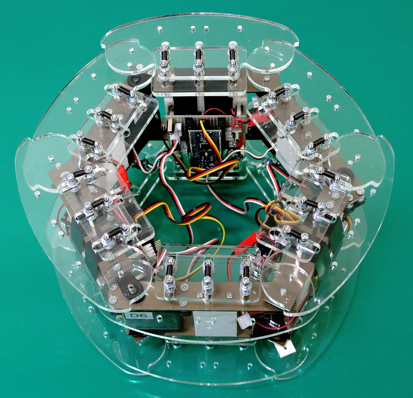
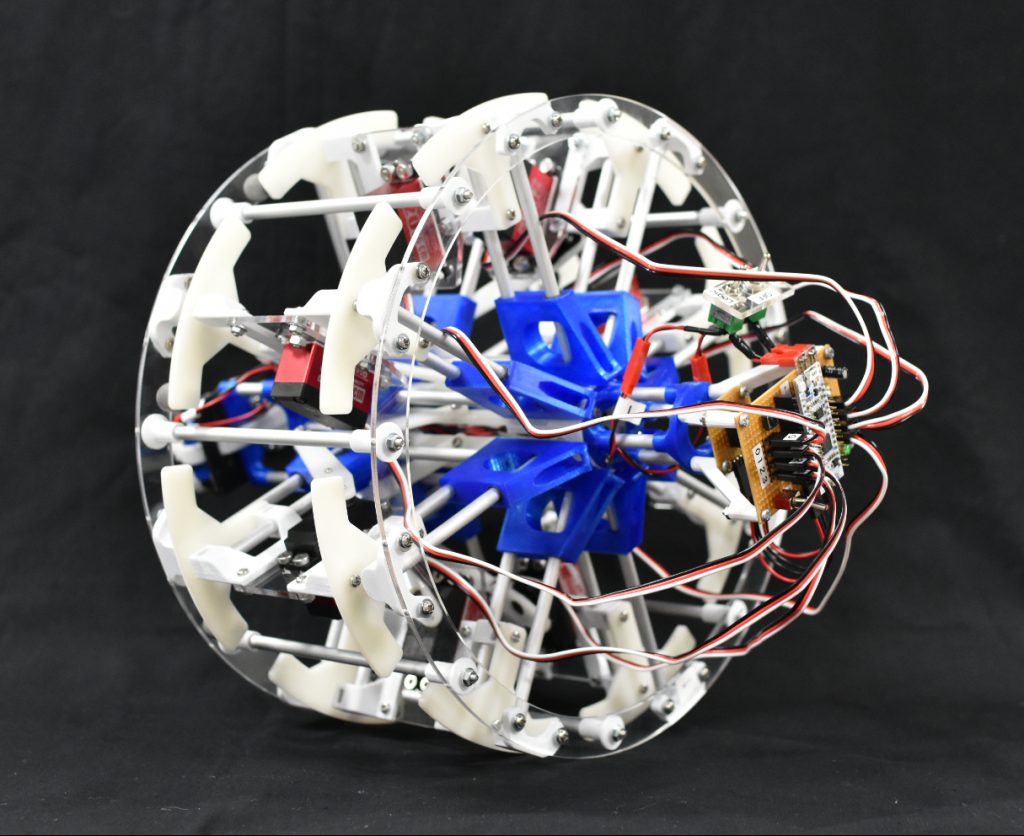
円筒型移動ロボット(Rolling Cyrinder)
平野哲郎

古瀬裕介・田中颯樹・工藤瑛人
- Rolling Mobile Robot Using Decentralized Mass-Driver Units ,Yusuke Furuse, Masato Ishikawa,IEEE Int’l. Conf. on Advanced Intelligent Mechatronics (AIM2017),2017.
- 工藤瑛人, 田中颯樹, 石川将人, 南裕樹:分散型質量駆動ユニットを用いた転がり移動ロボットの制御,平成29年度SICE関西支部・ISCIE 若手研究発表会, pp. 187-190, 2018.
- 水口佑太, 池田智裕, 南裕樹, 石川将人:強化学習による分散質量駆動型転がり移動ロボットの制御,平成30年度SICE関西支部・ISCIE 若手研究発表会, pp. 180-182, 2019.
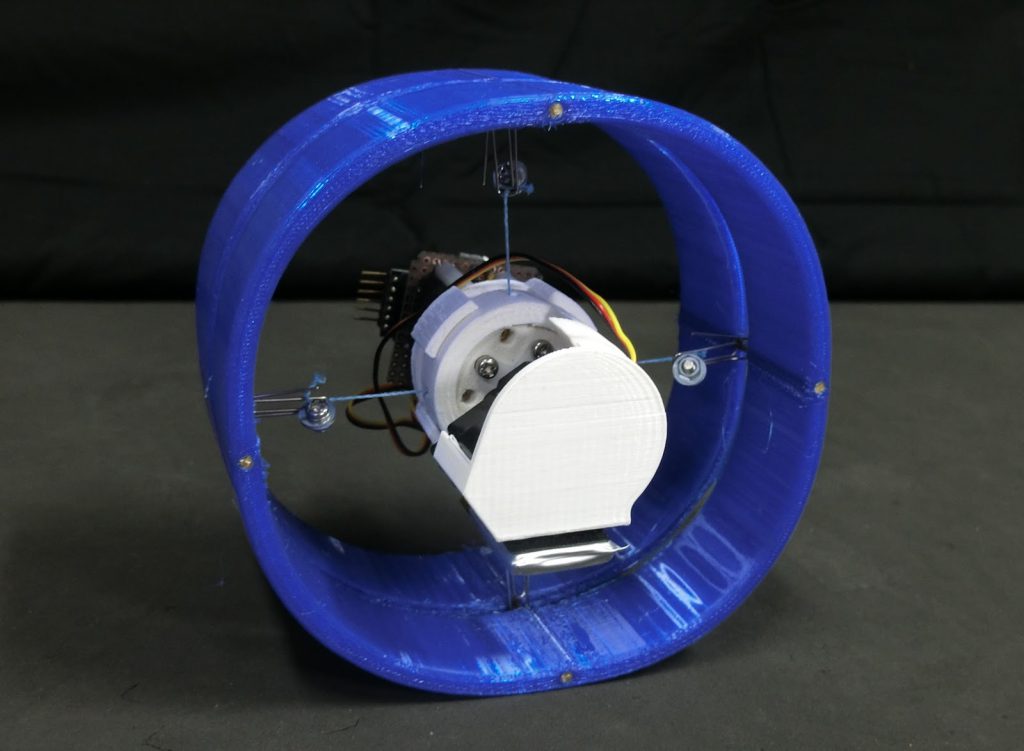
可変型転がり移動ロボット(Deformable Rolling Robots)
油圧ショベルの揺動移動
- 安谷 尚人, 深野 亮, 石川将人, 大須賀公一, 吉灘 裕:揺動原理を用いた油圧ショベル型移動ロボットDEMPSI,日本機械学会ロボティクス・メカトロニクス講演会(ROBOMECH2014), 1P1-L06, 2014.
その他の移動様式
共同研究者
- 三平研の仲間達:水野伸太郎君,伊達央君
- 木内裕介君(2007年度京大修了):球面型超音波モータの研究
- 小林義典君(2009年度京大修了):半球ロボット Surface Walkerの開発
- 北吉良平君(2010年度京大修了):球体ロボット Volvot の開発
- 岸元邦充君(2012年度阪大M2) :球体ロボット Volvot II の開発
(石川将人)