Recipe for Mckibben-Type Pneumatic Muscle English page
更新履歴
- 2022/01/21 外形9mmの人工筋肉レシピを本ページで公開しました.
- 2022/11/22 外形7mm,5mmの人工筋肉レシピをgithubで公開しました NEW 主開発:大阪大学 大須賀研の浪花先生&D後藤君
- 2023/01/11 本レシピの開発と普及活動が「計測自動制御学会 関西支部支部長賞 技術賞」を受賞しました。
- 2023/06/01 人工筋(など)の作りかた質問フォームを開設しました.
概要
本ページでは,増田容一(阪大),浪花啓右(神戸大),中西大輔(松江高専),浦大介(阪大),杉本靖博(阪大)が共同開発したマッキベン型人工筋肉のレシピを公開しています.ここで紹介するマッキベン型人工筋肉(通称:Y式マッキベン,以下:人工筋)は,特別な訓練を積んでいない学生が,限られた設備と手作業のみで量産できることを目指して設計されています.この人工筋は,具体的には以下のような特徴を持っています.
- 初学者であっても1分~3分/本で製作可能
- 1MPaの空気圧で駆動可能
- 簡便に着脱が可能
またこの人工筋は,上記の特徴を実現するために以下のコンセプトで設計されています.
- 作業工程の削減と安定化
- 外力に対する強度の向上
- 固定方法の簡易化
前置き
人工筋のレシピが論文内で具体的に記述されることはあまりありません.それゆえ,各研究室が試行錯誤を重ねて独自のレシピを構築しています.しかしながら,これらノウハウが公開されているケースは多くありません([1]や[2]など公開されているものもあります).
生物模倣ロボティクスやソフトロボティクスなどの分野に新規参入したい研究室にとって,人工筋のレシピ構築は参入障壁になります.本ページでは,このような状況を改善して,生物模倣ロボティクスやソフトロボティクスを盛り上げていくために,小型~中型のロボット研究に使用可能なマッキベン型人工筋肉のレシピを公開します.
人工筋肉を自作するのが面倒な方や,安定かつ高性能な人工筋が必要な方にはS-muscle社が販売している人工筋肉がおすすめです。
従来手法
マッキベン型人工筋肉の製作で特に重要かつ難しい工程は,人工筋の内部に高圧空気を閉じ込めるための端部の締結です.オーソドックスな方法は,針金を巻き付ける締結方法です[1].この方法は,針金を巻くためにある程度の訓練を必要とします.また,結束バンドを用いる方法[2]は簡便ではあるものの比較的低い空気圧下でしか利用できません.強力な接着剤を用いる方法[3,4]は,細いコンパクトな筋肉を製造できるメリットがありますが,手作業の場合には製作者に技量が求められます.そこで筆者らは,作業工程の削減と安定化,強度の向上,そして着脱の簡易化など,多数のメリットをもった人工筋肉の開発に取り組みました.
- [1] 田熊,「空気圧人工筋により駆動する柔軟な脚ロボット」, 日本ロボット学会誌, Vol. 37, No. 2, 2019.
- [2]「 Open soft machines 」http://opensoftmachines.com/2018/09/mini extensiblemckibben/?lang=j
- [3]「S-muscle」https://www.s-muscle.com/
- [4]「 コガネイ 空気圧人工筋肉Pneumuscle」 https://www.mirai-projects.com/pneumuscle
作業工程について,針金の巻き付けや難易度の高い接着工程を排除し,ホースクランプによるカシメ作業のみで締結する方法をとった.
外力を受けた際の強度の向上について,外力をカシメ金具と外側の編組チューブのみで受け止める構造とした.本締結方法を用いることで,カシメ金具が外側の編組チューブに固定されるうえ,編組チューブの反対側はもう一方のカシメ金具に固定されるため,両端のカシメ金具を引っ張る外力を受けたとしても,内部のゴムチューブや端部の栓には外力が伝わらない.このおかげで,マッキベン型人工筋肉の主な破壊パターン:栓が抜けることによる破裂や,編組チューブがカシメ金具から抜け落ちることによる網目の崩壊を防ぐことができる.
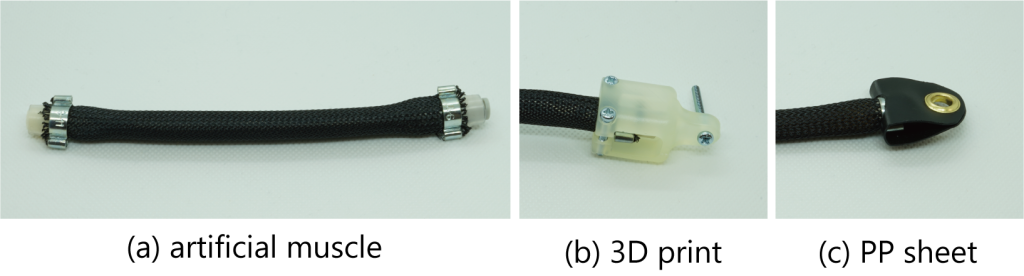
着脱の簡易化については,カシメ金具の一部が人工筋肉の径方向に飛び出すという性質を利用して,カシメ金具を接続用部品(人工筋をロボット骨格に接続する部品)に引っ掛ける方式をとった.模式図を以下に示す.高性能光造形プリンタなど,強固な接続用部品を製作できる場合は図中央(b)の手法を薦めるが,高性能光造形プリンタがない場合は,図右(c)のように樹脂シートをハサミやレーザーで切り出し,人工筋肉を通したのちに折り畳み,両面ハトメで固定すれば十分な強度が得られるうえ,ネジなどでの着脱が容易になる.
以下では,具体的な製作方法について解説します.
動画
まずは動画を見てください.動画を見ればだいたい分かります.
人工筋肉を動かすための実験環境はこちらです.空気圧ポンプは意外と安いです.
- 製作のコツ1…ABS用接着剤は空気栓にたっぷり付けてください.空気栓をシリコンチューブに挿入したあとは,栓とシリコンチューブを指で転がしたり揉んだりして,接着剤を栓の表面全体に馴染ませてください.
- 製作のコツ2…両端部の金具によるカシメでは出来るだけスリーブやゴムを噛まないように金具の両端を少しずつカシメてください.このとき,カシメ金具がシリコンチューブやナイロンスリーブをできるだけ噛まないようにしてください.特に,ナイロンスリーブには折り目が付いているので,折り目がカシメ金具に挟まれないように折り目とカシメ部を90度ずらすとよいです.さいごは工具の先端を持って全力でカシメてください.
- 製作のコツ3…最後のライターがこの設計の要です.外側の黒いスリーブだけを溶かして丸めることでカシメ金具に引掛けます.無理なら諦めてカシメ後の金具とスリーブとの間に瞬着を流し込んでもOKです.
- エラー対応1:壊れてしまうとき…力をかけた際に壊れたり,どうしてもスリーブが抜け落ちる場合は,金具とスリーブとの間に瞬着を流し込んでみてください.最後の工程でスリーブの端部を焼いてチリチリにしていないと,カシメ金具からスリーブの繊維が抜けてしまいます.
- エラー対応2:空気漏れ…ABS用接着剤は3Dプリントした空気栓の積層痕を消すためのものです.接着剤が少ない,もしくは全体に行き渡ってない場合は空気漏れが生じます.接着剤が乾いていないことが原因の場合もありますので,カシメ後に1時間ほど放置してみてください.また,端部のストレート接手(ストレート KQ2H ミリサイズ KQ2H04-00A)は必ず指定のものを使ってください.安いからと別のものを使うと,径の微妙な違いなどからうまく締結できない場合があります.
必要な物品
○空気圧はじめてセット …空気圧源まわりのセット.これさえあれば色々な実験ができるので,研究の幅が広がるかも?3万円くらいです。もうちょっと安いコンプレッサを買えば2万円ちょいで揃うかも?
- 【空気圧源の材料】
- SK-11 エアーコンプレッサー SR-L04SPT-01 25190円(全て税込)
- 日東工器 チューブフィッター付ハイカプラ200 プラグ 60PC 615円
- ピスコ(PISCO) ボールバルブ ユニオン BVU20-0606 1529円
- TRUSCO ポリウレタンチューブ TEN-6-10 1273円
- TRUSCO ポリウレタンチューブ TEN-4×X2.5-10 763円
- ピスコ(PISCO) 違径ユニオンストレート PG6-4 263円
○マッキベン型人工筋肉 …今回の目玉です.4mmチューブ対応,内径7mm,外形9mm程度.工具代2千円、人工筋肉1mあたり千円くらいです。編組チューブやシリコンチューブは10mくらいのまとめ買いがお得です。
- 【人工筋の材料】
- デンカエレクトロン ほつれにくい編組チューブ NFL-9 648円
タイガースポリマー シリコンチューブ SR1554(内径7mm,外形9mm) 219円(↓のほうが作りやすい)- モノタロウ シリコンチューブ MGJG-8×10 279円
- エスコ 9-11mm ホースクランプ(ツーイヤー型/10個) EA463AE-11 506円
- SMC ストレート KQ2H ミリサイズ KQ2H04-00A 318円
オエティカ クランプかしめ専用工具(スタンダードジョー)(販売停止)- ↑の代替品? アポロホースカシメ工具 2290円
- タミヤ タミヤセメント(ABS用) ITEM 87137 278円 …※3Dプリント品の積層痕を消すため
- 3Dプリント品 ABS製の栓:リンク
- 一般的な熱積層方式の3Dプリンタで造形可能
- 空気圧の漏れを防ぐため,インフィルは100%が理想
- 「ピスコ(PISCO) プラグ PP4」と「SMC ストレート KQ2H ミリサイズ KQ2H04-00A」の組み合わせでも代用可能
- 一般的な熱積層方式の3Dプリンタで造形可能
○人工筋の固定具 …ロボットと筋肉との接続部です
- 高強度3Dプリント材を使える場合
- CADファイル(リンク)を印刷してください.
- 高強度3Dプリント材の例:Form3 Durable Resin,MarkTwo カーボンフィラメントなど
- 高強度3Dプリント材を使えない場合
- 【簡易版固定具の材料】
- アクリルサンデー PPクラフトシート PS-3 S 0.75 692円
- メーカー任意 両面ハトメ(接続に用いるネジに合った内径のもの)
- メーカー任意 両面ハトメパンチ(ハトメの径にあったもの)
- メーカー任意 ポンチ(ハトメの径にあったもの)
利用許諾など
本ページの内容は,第34回自律分散システムシンポジウムで発表されたものです.本ページで紹介した人工筋肉の製作手法は,ページ管理者の許可なく利用可能です.利用許諾やクレジットの記載も不要です.
論文や予稿における引用も必須ではありませんが,引用により本レシピを周知いただければ周辺分野の発展に役立つかもしれません.
コメントや引用、改良案のアドバイスなどをいただけると喜びます.
ご質問・ご要望・活用報告など
トラブルシューティングのための質問フォームを開設しました.
作り方に関する質問があれば人工筋(など)の作りかた質問フォームにどうぞ.大阪大学の教員が回答していきますが,基本的に激務なので返信が遅れる場合があります.
ほか質問や,次回の要望などがあればこちらのフォームにどうぞ.活用報告は必須ではありませんが,報告があれば中の人が喜びます.
学会発表
増田,浪花,中西,浦,杉本「自律分散型ロボットのためのマッキベン型人工筋肉とその固定法の開発」第34回自律分散システムシンポジウム,2022.
浪花,増田,中西,浦,杉本「だれでも筋骨格ロボットキット」オープンソースの人工筋肉と実験環境のレシピ,日本機械学会ロボティクス・メカトロニクス講演会,2A2-M08,2022.
浪花,増田,後藤,中西,浦,杉本,大須賀「だれでも筋骨格ロボットキット」自律分散化に向けたバリエーションと応用,計測自動制御学会 システム・情報部門 学術講演会 (SSI),2022.