Nonlinear control of snake robots by nonholonomic system approach
The Model
The figure illustrates a simple 3-link snake robot model. (we only consider its kinematic behavior, neglecting dynamic one).It is composed of three rigid links with two joints.
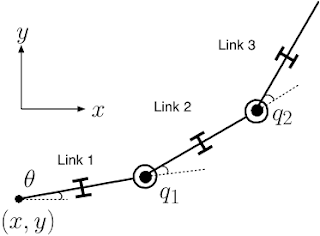
Each link has a passive wheel on its center, which does not slip nor slide sideways. Let (x,y,θ)(x,y,θ) denote its head position and orientation, and (q1,q2)(q1,q2) denote joint angles. We also assume that the joint angular velocities are given as the control input u=q˙u=q˙. This 2-input 5-state system is an example of nonholonomic system with two generators, which is structurally distinguished from those with single generator, convertible to well-known chained form systems [2]. Its controllability Lie algebra is expressed as {g1, g2, [g1,g2], [g1,[g1,g2]], [g2,[g1,g2]]}. The ball-plate manipulation problem[5-7] is also categorized into the same class.
Parallel driving
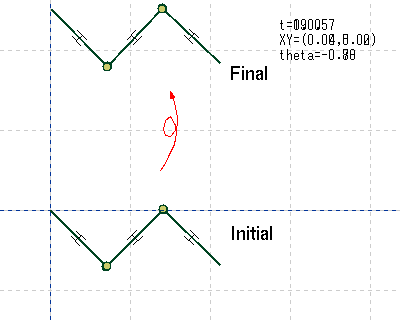
An illusrative demonstration — pararrel driving of the snake along “y”-axis. In this case, the snake is tracking a moving target specified as (x,y+0.8), where the current position is (x,y). Please look with keen interest that the snake is moving in the direction perpendicular to its body! This motion is essentially artificial, different from those obtained from bio-mimetic approaches.
Parallel parking: Point-to-Point control with iterative tuning
- Initial head position = (0,0)[m] / orientation = 0 [rad]
- Desired head position = (0,5.0)[m] / orientation = 0 [rad]
Publications
- M. Ishikawa, M. Shinagawa, K. Owaki and T. Sugie: Control of Snake-like Robot based on Nonlinear Controllability Analysis, IEEE International Conference on Control Applications (as a part of MSC2010), Yokohama, 2010.
- Iterative Feedback Control of Snake-like Robot based on Principal Fiber Bundle Modeling, International Journal of Advanced Mechatronic Systems, Vol.1, No.3, pp.175-182, 2009.
- Snake Robots and Trident Snake Robots: Control Based on Controllability Analysis, Journal of SICE, vol.45, no.7, pp.620-625, 2006(in Japanese).
- Control of nonholonomic drift-free systems by iterative curvature feedback, the 3rd IFAC workshop on Lagrangian and Hamiltonian Methods in Nonlinear Control (LHMNLC’06), 2006.
References
- Shigeo Hirose; Biologically Inspired Robots (Snake-like Locomotor and Manipulator), Oxford University Press, 1993.
- Lijeback et al.: Snake Robots,Springer, 2013.
- Murray, R.M and S.S. Sastry: Nonholonomic motion planning: Steering using sinusoids, IEEE Trans. on Automatic Control, 38(5),pp.700–716.
- Bloch, A.M.: Nonholonomic Mechanics and Control, Vol.24 of Interdisciplinary Applied Mathematics (IAM). Springer Verlag, 2003.
- Ishikawa, M. : Feedback control of symmetric affine systems with multi-generators. In IFAC World Congress, 2002.
- Date,H and Sampei,M. and Ishikawa,M. and Koga,M: Simultaneous Control of Position and Orientation for Ball-Plate Manipulation Problem based on Time-State Control Form, IEEE Trans. on Robotics and Automation,2004.
- Casagrande,D. and Astolfi,A. and Parisini,T.: A stabilizing time-switcihng control strategy for the rolling sphere, Control and Decision Conference,pp.3297-3302,2005.
- Bicchi,A. and Sorrentino,R.: Dexterous Manipulation Through Rolling, International Conference on IEEE Robotics and Automation,pp.452-457,1996.