三叉ヘビロボット (Trident Snake)とは
こんなロボット見たことありますか?
三叉ヘビロボットとは,図のような奇妙な形態をもつ移動ロボットです.中央にベースプレートがあり,そこから三方向に足が放射状に延びています.それぞれの足は一つまたは複数のリンクからなっていて,関節にはアクチュエータがついており,また各リンクには横滑りをしない受動車輪がついています.車輪を駆動せず,関節だけをくねくねと動かすことで,移動したり回転したりさせることを考えます.
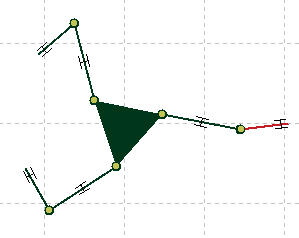
最小の構成は上図のように各足が1リンクからなる「1リンク型」です.左の図は「2リンク型」で,原理的にはいくらでもリンクを延ばしたものを考えられます.なお,図ではベースプレートを正三角形に描いていますが,動きに影響するわけではないので別にどんな形でもかまいません.(もっといえば,放射の方向がずれていても,長さがまちまちでも,計算が面倒になるだけで本質は変わりません.)
生き物のヘビに着想を得たヘビロボットについては,東工大の広瀬先生に始まる長く深い研究の歴史があり,ご存知の方も多いことでしょう.三叉ヘビロボットは,細長いヘビを3体集めて中央でつなぎ合わせたものともいえます.ヘビロボットの場合は,生物のヘビの動きを詳細に観察してそれを機械的に再現することから研究が始まりました(バイオミメティックアプローチ).ところが三叉ヘビの場合は,お手本にすべき生物が自然界に存在しません.そのかわりに我々は力学と数学と制御の原理、とくに拘束系の力学と微分幾何学と非線形制御理論を武器として,その本質の解明に挑戦しています。
誕生の経緯
この三叉ヘビロボットは,非ホロノミックシステムの可制御性構造,状態空間の位相構造という,非線形制御に関する純粋に理論的な考察の過程において生まれたものです.我々は「1ジェネレータ・1次のシステムには三輪車両,1ジェネレータ・高次のシステムには牽引車両という典型例があるのに対し,2ジェネレータ・1次のシステムの例となるものも移動ロボットの世界に考えられないだろうか」という問いをもちました.そこで最初に,2ジェネレータ・1次の可制御構造をもつ対称アフィン系の具現化として1リンク型の三叉ヘビを考案しました.すなわち,ロボットを数式でモデル化したのでなく,数式をもとにしてロボットを具現化したわけです.また,三輪車両が2次元宇宙ロボットと等価であるのに対して、1リンク三叉ヘビは3次元宇宙ロボットと同じ構造を持つという興味深い対比もみられます。
三叉国語審議会より
漢字表記は「三叉」です.「三又」ではありませんのでご注意下さい. 「叉」は主に空間的な分岐(例:交叉点・音叉),「又」は主に時間的・論理的な反復(例:又の機会・又聞き)を表す漢字であるからです. 口頭では訓読みで「みつまた」とご発音下さい.
基本原理
研究の初期に確立した,ホロノミーの原理に基づく周期運動のシミュレーションを紹介します(2004年頃に作成したものですので少々見映えがよくないですがご了承ください).
通常のヘビ型ロボット
通常のヘビロボットは,例えばこんなふうに動きます.まずどちらか一端を先頭と決め,その関節を周期的に振ります.2関節目以降は少しずつ位相を遅らせた周期運動を行わせると,先頭側に推進していきます.身体が頭の方向に移動していくのに対し,身体の「波」は頭から尾に向かって伝播していくので,これを”retrograde wave”と呼ぶこともあります.
なお,運動学(kinematics)的には,先頭の2関節の角速度を決めると後続の関節の角速度も一意に決まってしまいます.)
1リンク三叉ヘビ型ロボット
回転制御(反時計回り)
並進制御
2リンク三叉ヘビ型ロボット
回転制御(反時計周り)
並進制御
三叉ヘビ研究史
ミツマタギャラリー
Trident 0-LEGO 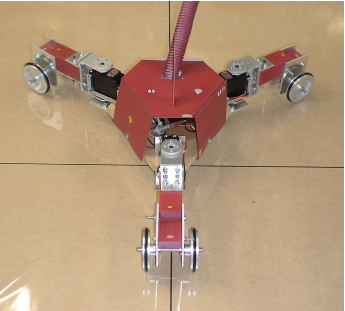
Trident I 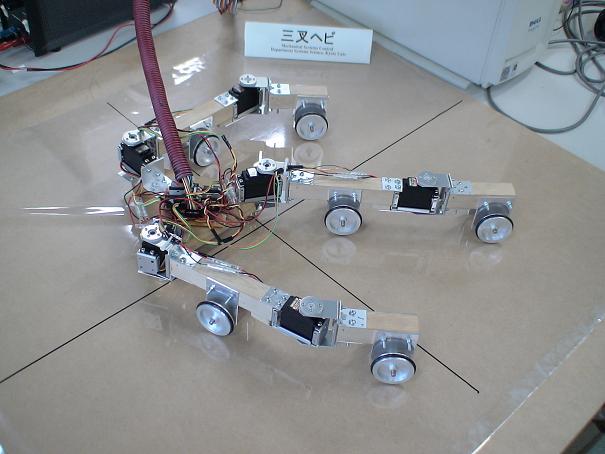
Trident II 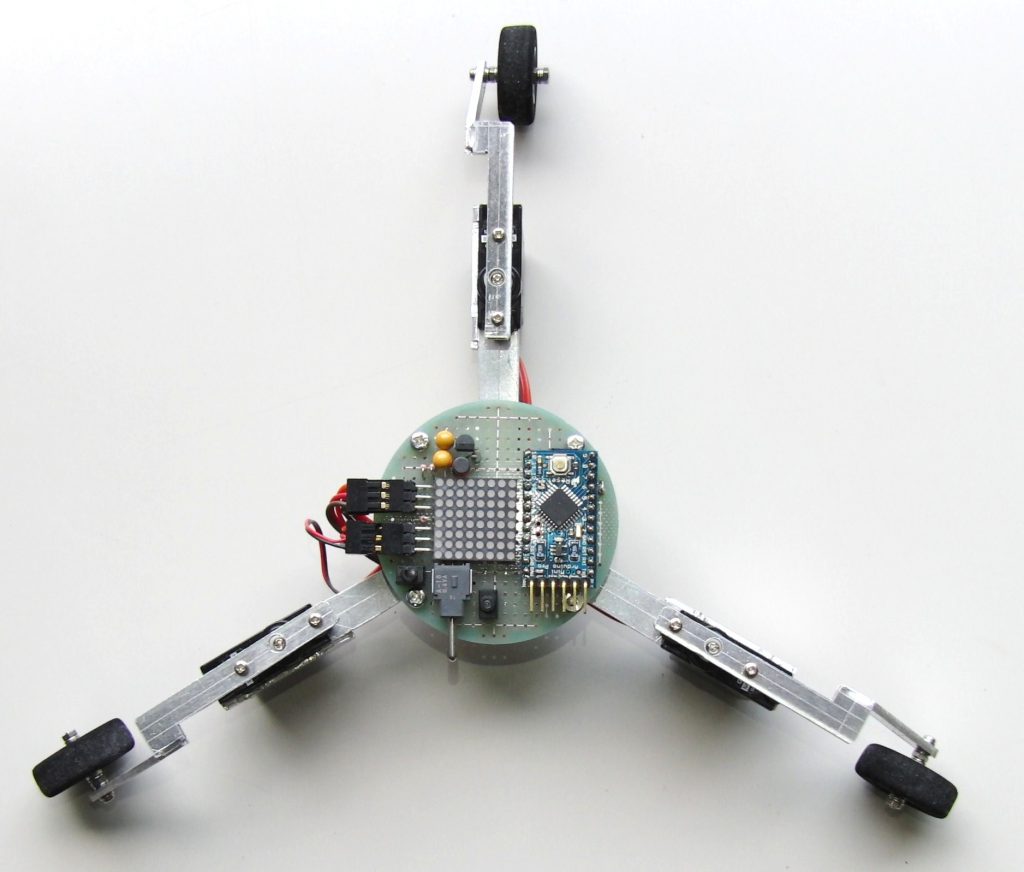
Trident III-maru 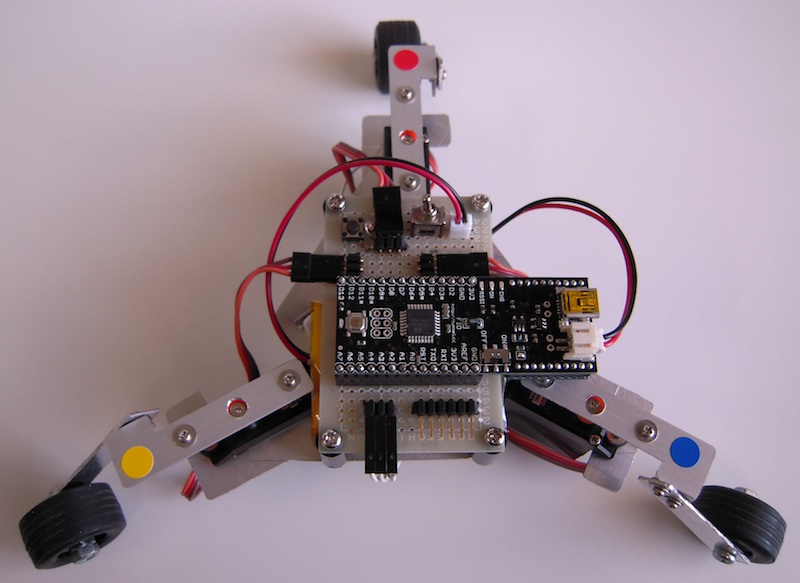
Trident IV 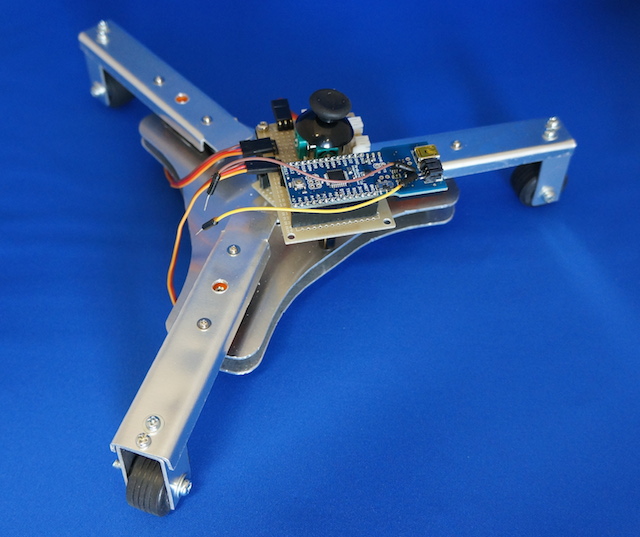
Trident V-JJ 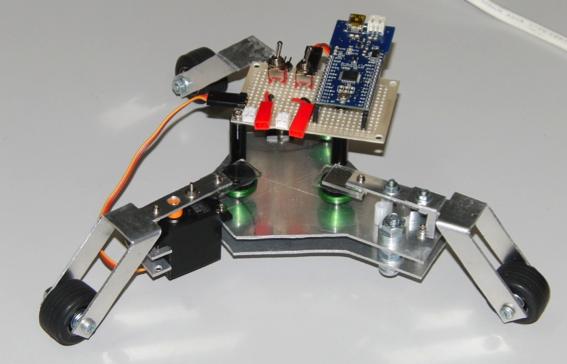
Trident VI-NCO 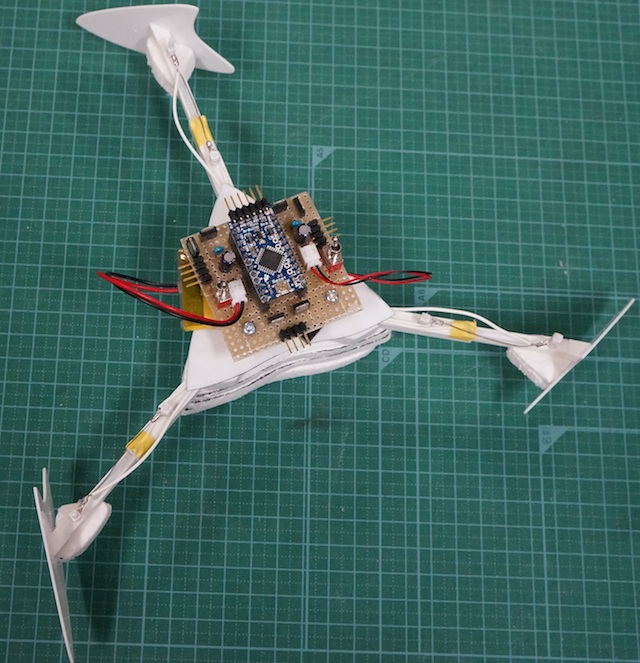
Trident strider 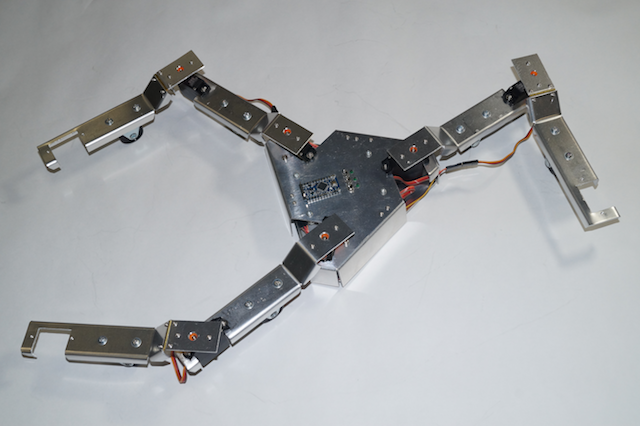
Die Dreibeinschlange 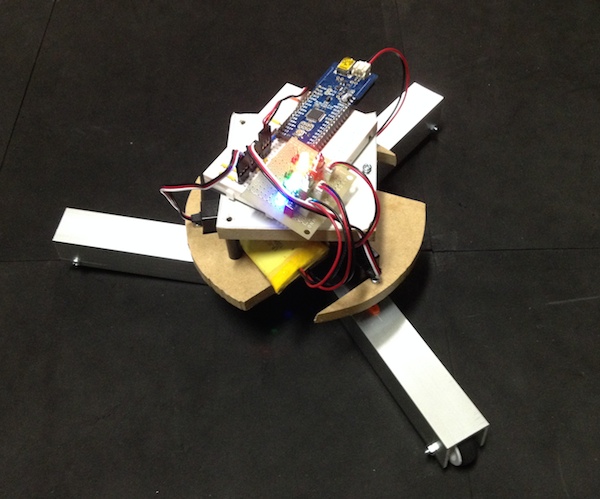
Trident EZ 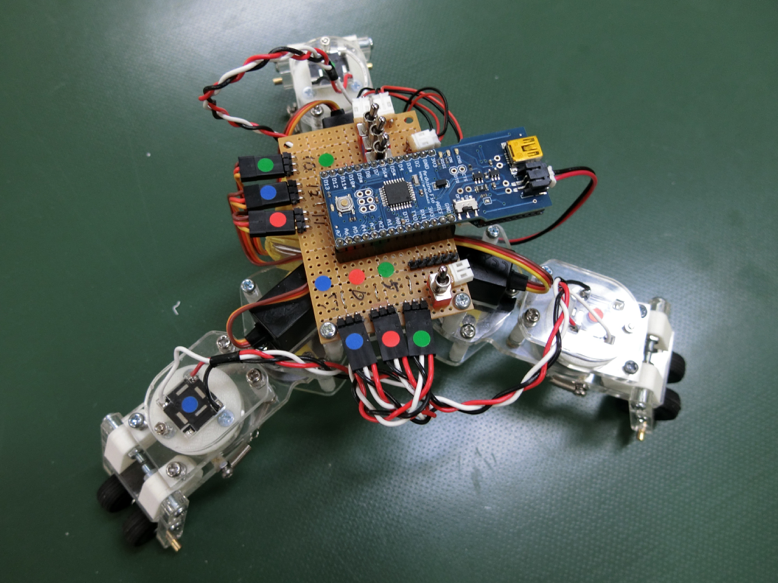
Trident VII-tegotae 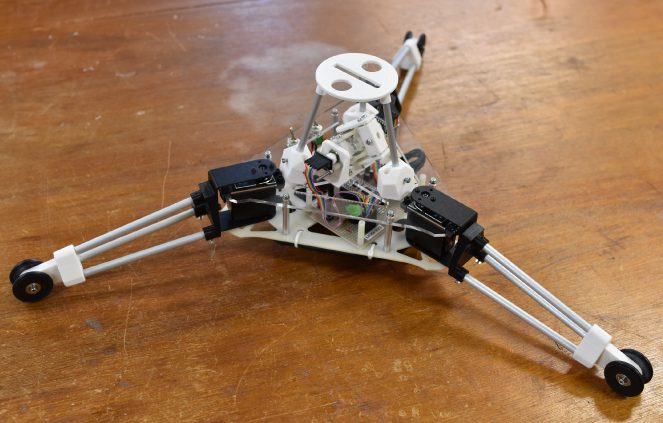
Trident VIII-pendulum
- Trident 0
- Trident I & II
- Trident III & IV
三叉トリビア
- イギリスではかつて3ペンス硬貨が使われていました.写真は,ロンドン滞在中に露店で見つけたジョージV世(エリザベス女王の祖父)時代の銀貨です.イギリスではありふれたものらしく,古銭としての価値はたいしてありません.右の方は,発行が1933年です.

- 前任地(京大宇治キャンパス)のあった宇治市の徽章(シンボルマーク)が三叉チックです. 宇治市の「宇」の字を図案化したものとのこと(宇治市民憲章より).
- イギリス・マン島の旗, イタリア・シチリア州の旗をはじめとした世界各地にtriskelion(三脚巴)とよばれる意匠が見られます.
- 植物のミツマタ:和紙の材料として知られる「こうぞ・みつまた」のミツマタ(三椏)は,ジンチョウゲ科ミツマタ属の低木です.普通の木は二叉の分枝(binary branch)の繰り返しであるのに対し,枝が一点から三叉状に分かれるという特徴的な分枝をするためにこの名がついたそうです.
- 地名のミツマタ:新潟県湯沢町には,有名な「かぐら・みつまたスキー場」や道の駅みつまたがあります.地名としてのミツマタは,だいたい近くに三叉路があるか,↑の植物のミツマタに由来しているようです.
- 小惑星のミツマタ:小惑星 16731 Mitsumataは1996年に鳥取県の佐治天文台(さじアストロパーク)で発見されました.この地が,↑↑の植物のミツマタを材料とする因州三椏和紙の産地であることにちなんで名付けられたそうです.
その他
- 関連文献
- 三叉関係者の人々